- 「PID制御って言葉は聞くけど、P・I・Dそれぞれが何をしているのかイメージできない…」
- 「定常偏差ってなに?なぜP制御だけだと残るの?」
- 「電験三種の過去問(H28 問13など)でPIDの穴埋め問題が出るけど、丸暗記では不安…」
- P動作(比例)=「ズレに比例してアクセルを踏む」意味と限界
- I動作(積分)=「蓄積したズレを消す」仕組みと定常偏差がゼロになる理由
- D動作(微分)=「急変を先読みしてブレーキをかける」役割
- PID制御の全体像と、電験三種の穴埋め問題で確実に5点取るためのポイント
工場の生産ラインで温度制御をしているとき、「設定温度に近づくけど、いつまでもピッタリにならない」という経験はありませんか。あるいは、逆にオーバーシュートして行き過ぎてしまう。この「なぜピッタリにならないのか」を理解するカギが、PID制御です。
PID制御は、電験三種の「機械」科目で頻出のテーマです。H28 問13のような穴埋め問題では、P・I・Dそれぞれの動作の特徴を「言葉で」正しく選ぶ力が求められます。数式を暗記するだけでは太刀打ちできません。
この記事では、PID制御の3つの動作を「車の運転」に例えて、すべて図解で説明します。この例えが頭に入れば、電験の問題文を読んだ瞬間に「あ、これはI動作の話だ」と反射的にわかるようになります。
目次
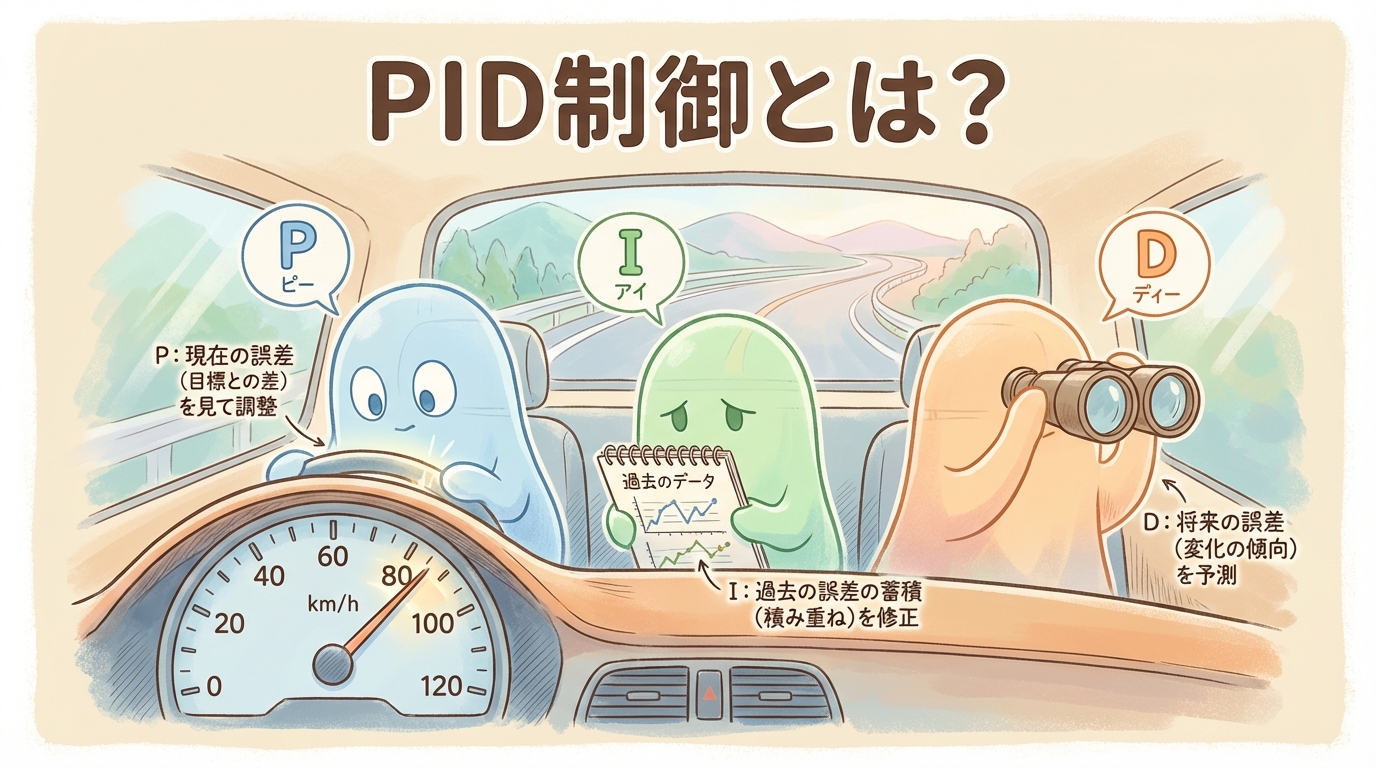
PID制御とは?|3人のドライバーが1台の車を操る
PID制御とは、P(比例)・I(積分)・D(微分)の3つの動作を組み合わせて、目標値にピッタリ合わせる制御方式のことです。
これを「車の運転」で例えます。あなたは高速道路を走っていて、目標速度100km/hを維持したい。でも、上り坂や向かい風など外乱がある。このとき、3人のドライバーがそれぞれ違う判断基準でアクセルとブレーキを操作しているイメージです。
P(比例)動作
「今のズレ」を見る
ズレが大きいほど強くアクセルを踏む
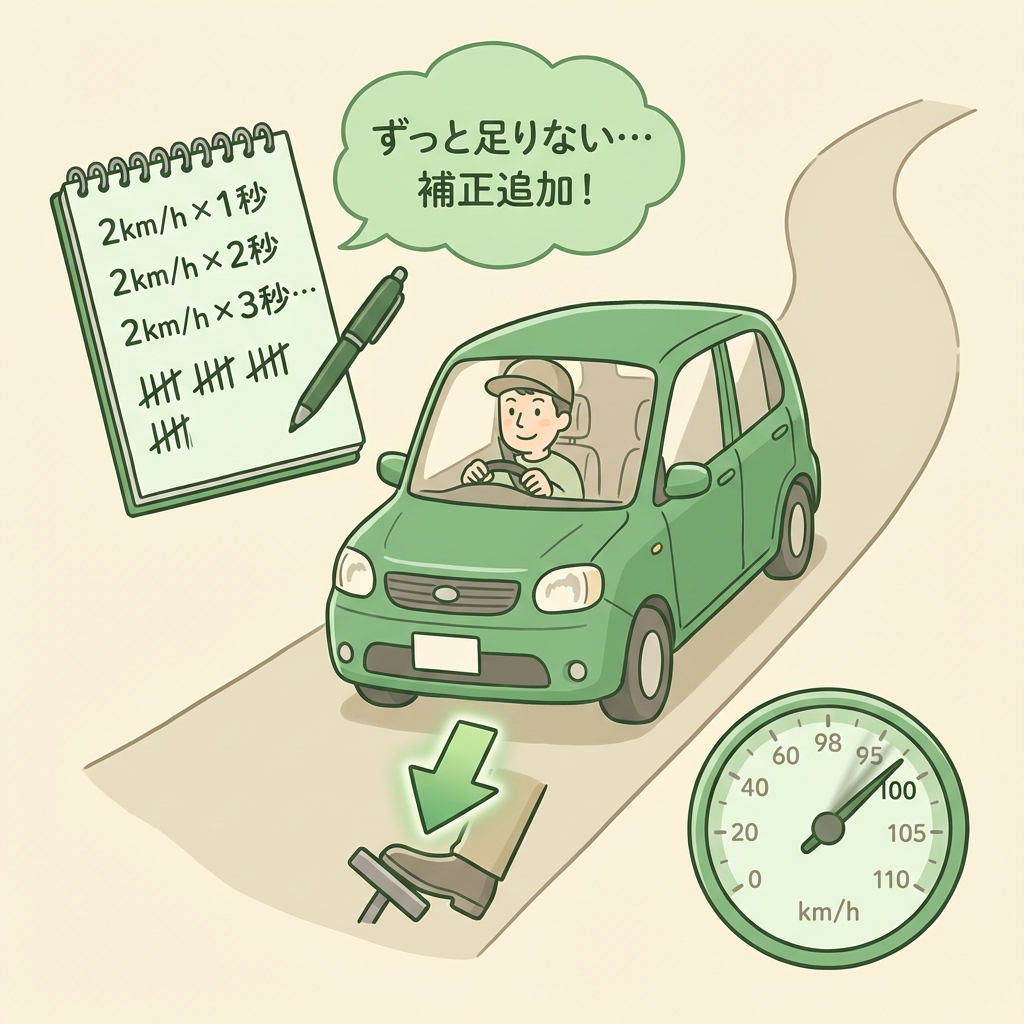
I(積分)動作
「ズレの蓄積」を見る
小さなズレが続いているなら、じわじわ補正を追加
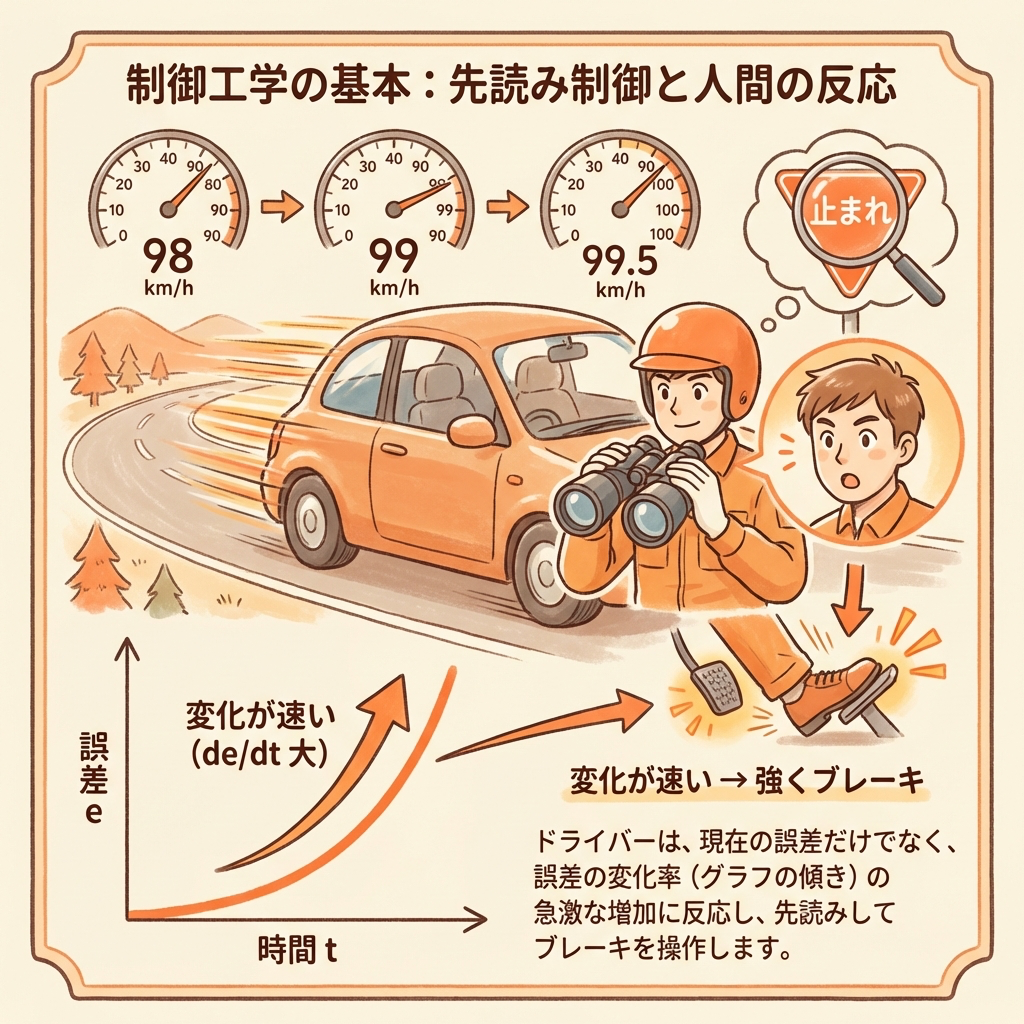
D(微分)動作
「ズレの変化速度」を見る
急に変化したら、先読みしてブレーキをかける
PID制御の本質は、「今」「過去」「未来」の3つの時間軸で偏差を見ることです。P=今のズレ、I=過去のズレの合計、D=未来のズレの予測。この3つを組み合わせることで、速く・正確に・安定して目標値に到達できます。
では、P・I・Dそれぞれの動作を1つずつ、車の運転で詳しく見ていきましょう。

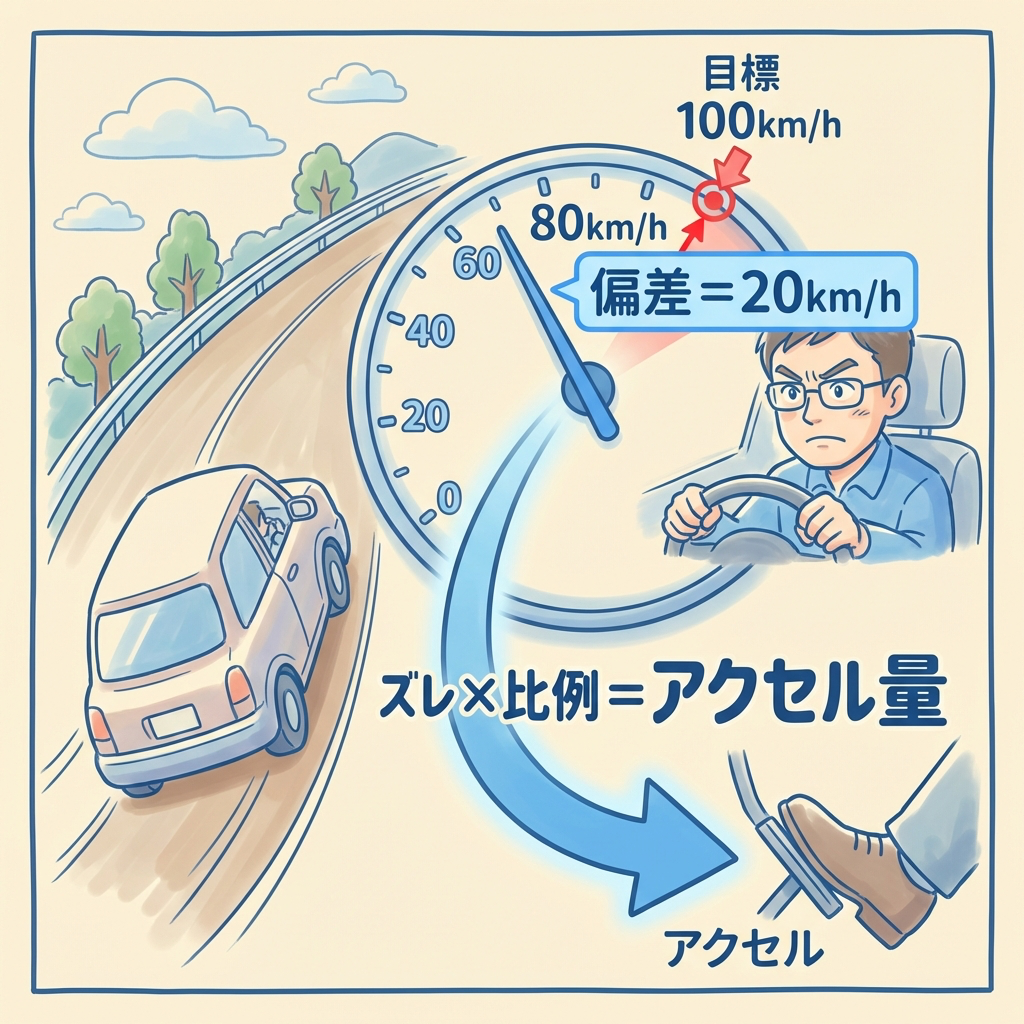
P動作(比例動作)|「ズレが大きいほどアクセルを強く踏む」
🅿️ P動作のイメージ:今の速度メーターだけを見て運転するドライバー
P動作(Proportional:比例)は、「今この瞬間の偏差(=目標値と現在値のズレ)の大きさに比例して、操作量を出す」動作です。
車の運転で言えば、こんなドライバーです。
🚗 状況:目標速度100km/h、現在80km/h(偏差=20km/h)
Pドライバー「20km/hも足りない! アクセルをグッと踏むぞ!」
🚗 状況:目標速度100km/h、現在95km/h(偏差=5km/h)
Pドライバー「5km/hだけ足りないから、アクセルをちょっとだけ踏もう」
これを数式で書くと、次のようになります。
操作量 = KP × 偏差 e(t)
KP:比例ゲイン(アクセルの「敏感さ」を決める定数)
KPが大きいほど、少しのズレでもドカンとアクセルを踏みます。逆にKPが小さいと、おっとりした運転になります。
🚨 P動作の致命的な弱点:「定常偏差」が残る
P動作だけで制御すると、目標値に「近づくけれど、ピッタリにはならない」という現象が起きます。これが定常偏差(オフセット)です。
なぜそうなるのか? 車の運転で考えましょう。
🏔️ 上り坂を走行中の状況
目標:100km/h
① 偏差20km/h → アクセル強め → 速度が上がる → 偏差が減る
② 偏差10km/h → アクセル中くらい → まだ上がる → 偏差がさらに減る
③ 偏差2km/h → アクセルほんの少し → あれ? 上り坂の抵抗とちょうど釣り合ってしまった!
⚠️ 偏差が2km/hの時のアクセル量 = 上り坂で速度を維持するのに必要な力
→ 偏差がゼロになると、アクセルもゼロになってしまう
→ でも上り坂では、アクセルゼロだと減速してしまう
→ だから「少しズレた状態」で安定してしまう = 定常偏差
製造現場の温度制御で「設定温度200℃なのに、いつも198℃あたりで安定してしまう」という経験はありませんか? これがまさにP制御の定常偏差です。外乱(ドアの開閉による熱損失など)がある限り、P制御だけでは目標値にピッタリ到達できません。
| 項目 | P動作の特徴 |
|---|---|
| 何を見ている? | 今この瞬間の偏差 e(t) |
| 操作の特徴 | ズレが大きい → 操作量大、ズレが小さい → 操作量小 |
| メリット | 応答が速い。ズレにすぐ反応する |
| デメリット | 定常偏差(オフセット)が残る |
| 電験での出題ポイント | 「比例動作のみでは定常偏差が残る」→ 超頻出! |
I動作(積分動作)|「ズレの蓄積を消すために、じわじわ補正する」
🔄 I動作のイメージ:「ずっとちょっとだけ遅いな…」と気づく記憶力のあるドライバー
I動作(Integral:積分)は、「過去の偏差を時間で積み上げて、その合計に比例した操作量を出す」動作です。
車の運転で言えば、P動作の横に座っている「助手席のドライバー」です。
🚗 P動作だけの状態(上り坂で定常偏差2km/hが残っている)
Pドライバー「偏差2km/hだから、アクセルはこれくらいだな」
→ 1秒後も2km/h足りない。5秒後も2km/h足りない。10秒後もまだ2km/h足りない…
🔄 ここでI動作が登場
Iドライバー「おい、もう10秒も2km/hずつ足りない状態が続いてるぞ。合計20km/h×秒分のズレが溜まってる。そろそろアクセルを少し追加しよう」
→ アクセルが少し追加される → 速度が上がる → 偏差が1km/hに減る
→ まだ偏差が残っている → ズレの合計がさらに増える → もう少し追加
→ 偏差がゼロになるまで、追加し続ける → 定常偏差が消える!✨
操作量 = KI × ∫ e(t) dt
KI:積分ゲイン / ∫ e(t) dt:偏差の時間積分(=過去のズレの合計面積)
🧠 なぜI動作で定常偏差が消えるのか?
これは電験三種で最も問われるポイントです。理屈をしっかり押さえましょう。
【定常偏差がゼロになる理由を3行で】
① I動作は「偏差の合計」に比例して操作量を出す
② 偏差がわずかでも残っていれば、時間とともに合計はどんどん増え続ける
③ 合計が増える → 操作量が増える → 偏差が減る → 偏差がゼロになるまで止まらない
✅ つまり、偏差がゼロのとき、そしてそのときだけ、積分値の増加が止まる
→ だからI動作を入れると、最終的に必ず偏差ゼロに到達する
⚠️ I動作の弱点:オーバーシュートしやすい
I動作には弱点もあります。「過去のズレの合計」がたまりすぎると、目標値を通り過ぎてもまだ操作量を出し続けてしまいます。これがオーバーシュート(行き過ぎ)です。
🚗 Iドライバー「10秒間もズレが溜まったから、アクセル追加!追加!」
→ 100km/hに到達しても、溜まった分の操作量がまだ残っている
→ 105km/hまでオーバーシュート → 今度は逆にブレーキが必要に…
→ 振動的な挙動(ハンチング)を起こすことがある
| 項目 | I動作の特徴 |
|---|---|
| 何を見ている? | 過去の偏差の合計(時間積分 ∫e dt) |
| 操作の特徴 | 小さなズレでも長く続けば操作量がじわじわ増加 |
| メリット | 定常偏差(オフセット)をゼロにできる |
| デメリット | オーバーシュート(行き過ぎ)が起きやすい、応答が振動的になりやすい |
| 別名 | リセット動作(偏差をリセット=ゼロにするから) |
| 電験での出題ポイント | 「積分動作を加えると定常偏差が除去される」「リセット動作とも呼ばれる」 |
I動作の「効きの速さ」を調整するパラメータがリセットタイム(TI)です。TIが短いほどI動作の効きが速くなり、定常偏差は早く消えますが、オーバーシュートも起きやすくなります。TIが長いほど穏やかに補正しますが、定常偏差が消えるまで時間がかかります。

{kind=link}
D動作(微分動作)|「急変を先読みしてブレーキをかける」
⚡ D動作のイメージ:遠くの信号を見て早めにブレーキを踏むドライバー
D動作(Derivative:微分)は、「偏差の変化速度(=偏差が増えている速さ/減っている速さ)に比例して操作量を出す」動作です。
車の運転で言えば、「先の状況を読む名ドライバー」です。
🚗 PI制御だけの状態(オーバーシュートしそうな場面)
現在98km/h → 99km/h → 99.5km/h → 100km/hに近づいている!
P+I「まだ偏差があるからアクセル踏み続けるぞ!」
→ 100km/hを超えてオーバーシュート…
⚡ ここでD動作が登場
Dドライバー「おい、偏差がすごい速さで減っているぞ。このままだと目標値を超える。今のうちにブレーキをかけろ!」
→ オーバーシュートが抑えられ、スムーズに100km/hに着地✨
操作量 = KD × de(t)/dt
KD:微分ゲイン / de(t)/dt:偏差の時間変化率(偏差がどれだけ速く変化しているか)
ここで重要なのは、D動作は偏差の「大きさ」ではなく「変化の速さ」に反応するという点です。偏差が大きくても、それが一定であれば(変化していなければ)D動作の出力はゼロです。
⚠️ D動作の注意点:単独では使えない
D動作は「変化速度がゼロなら操作量もゼロ」です。つまり、一定の偏差が続いている状態では何もしません。このため、D動作だけで制御することは不可能です。必ずPやIと組み合わせて使います。
| 項目 | D動作の特徴 |
|---|---|
| 何を見ている? | 偏差の変化速度(微分 de/dt) |
| 操作の特徴 | 偏差が急変 → 大きく反応、偏差が一定 → 反応しない |
| メリット | オーバーシュートを抑制、応答を安定化 |
| デメリット | ノイズに敏感(微小な変動にも過敏に反応)、単独では使えない |
| 別名 | レート動作(変化の速度=rateに反応するから) |
| 電験での出題ポイント | 「微分動作はオーバーシュートを抑制する」「レート動作とも呼ばれる」 |
D動作の「先読みの度合い」を調整するパラメータがレートタイム(TD)です。TDが大きいほど先読みが強く、オーバーシュートを強力に抑えますが、大きすぎるとノイズにも過敏に反応してしまいます。
P・I・Dを一覧で比較|「今・過去・未来」の3人のドライバー
ここまでの内容を1つの表で整理します。この表が頭に入っていれば、電験三種の穴埋め問題はほぼ解けます。
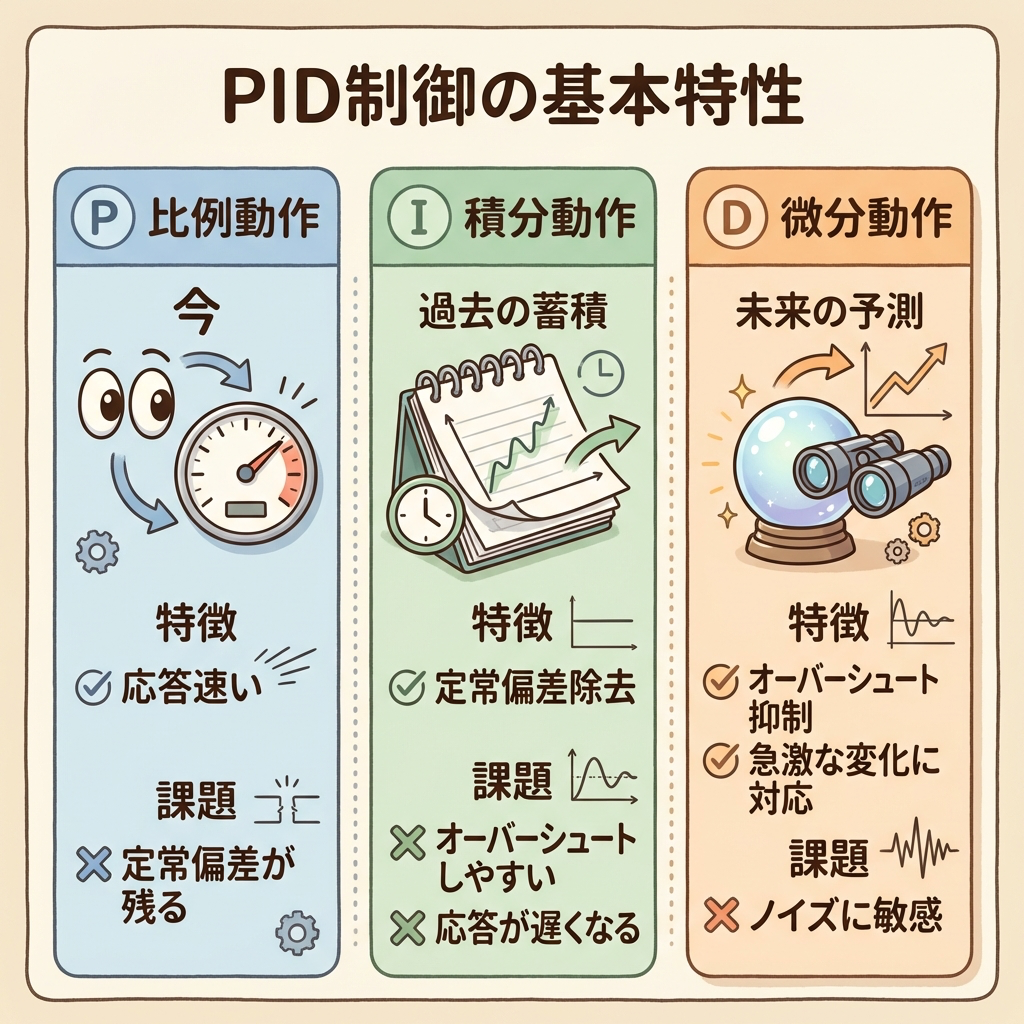
| 🅿️ P(比例)動作 | 🔄 I(積分)動作 | ⚡ D(微分)動作 | |
|---|---|---|---|
| 見ている時間軸 | 今 | 過去(の蓄積) | 未来(の予測) |
| 数学的操作 | 偏差 e(t) にそのまま比例 | 偏差の積分 ∫e dt | 偏差の微分 de/dt |
| 車の例え | ズレが大きいほど強く踏む | ズレが溜まったら補正を追加 | 急変を察知して先にブレーキ |
| 得意なこと | 素早い応答 | 定常偏差の除去 | オーバーシュート抑制 |
| 苦手なこと | 定常偏差が残る | オーバーシュートしやすい | ノイズに弱い、単独不可 |
| 別名 | 比例動作 | リセット動作 | レート動作 |
| 調整パラメータ | 比例ゲイン KP | 積分時間 TI(リセットタイム) | 微分時間 TD(レートタイム) |

制御の組み合わせパターン|P、PI、PD、PIDの違い
実際の制御では、P・I・Dの全部を使うとは限りません。制御対象の特性に合わせて、組み合わせを選びます。電験三種でも「PI制御の特徴は?」のように問われるので、各パターンの挙動を押さえましょう。
| 制御方式 | 定常偏差 | 応答速度 | 安定性 | 車の例え |
|---|---|---|---|---|
| P制御 | 残る | 速い | 良い | メーターだけ見て運転。近づくが到達しない |
| PI制御 | なくなる | やや遅い | やや振動的 | 記憶力のある助手がズレを補正。ピッタリ到達するが行き過ぎることも |
| PD制御 | 残る | 速い | 非常に良い | 先読みドライバーが安定化。ただし目標値に到達はしない |
| PID制御 | なくなる | 速い | 良い | 3人のドライバーが協力。速く・正確に・安定して到達 |
「PD制御は定常偏差を除去できるか?」→ できません。定常偏差を除去できるのはI動作だけです。D動作はオーバーシュートを抑制しますが、偏差そのものを消す力はありません。「I動作が入っているかどうか」で定常偏差の有無を判断してください。

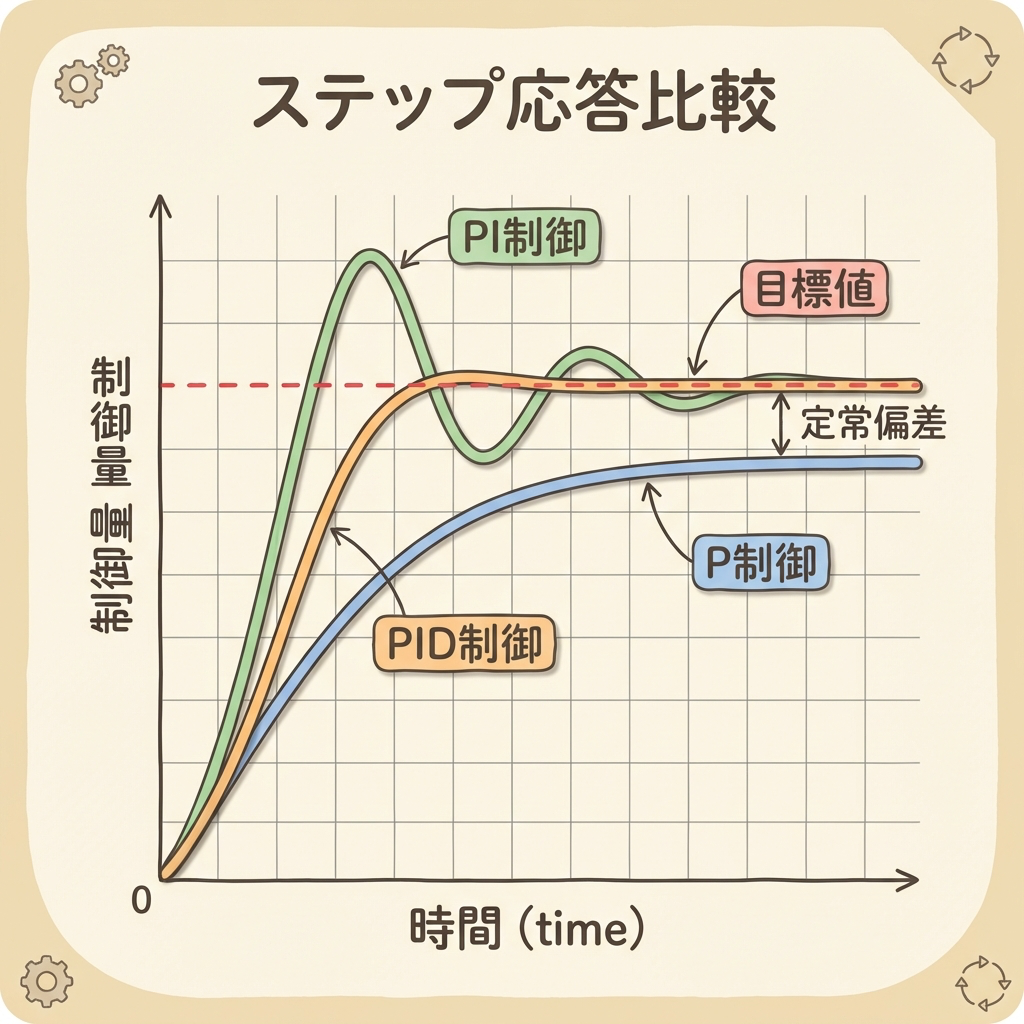
P・PI・PIDの応答波形をイメージで比較
「目標値にステップ的に変化させたとき(=いきなり100km/hを目指す)の制御量の動き」をイメージで比較します。電験の問題では「この波形はどの制御か?」と問われることがあるので、各パターンの特徴を押さえましょう。
📊 P制御の応答イメージ
🔵 P制御は目標値に近づくが、到達しない。ずっと「あと少し」が残る。
📊 PI制御の応答イメージ
📈 最初は目標値に向かって上昇
⬆️ 目標値を超えてオーバーシュート!
📉 戻ってきて、また少し下回る(アンダーシュート)
📈📉 何度か振動した後…
✅ 最終的に目標値にピッタリ一致(定常偏差ゼロ)
🟢 PI制御は定常偏差を消せるが、オーバーシュート(行き過ぎ)が起きやすい。
📊 PID制御の応答イメージ
📈 最初は目標値に向かって上昇
⚡ D動作が「近づいてるぞ、減速!」と先読みブレーキ
✅ ほぼオーバーシュートなしで、目標値にスムーズに到達
✅ I動作により定常偏差もゼロ
🟠 PID制御は速く・正確に・安定して目標値に到達する。3つの動作のいいとこ取り。
応答波形の問題では、①定常偏差が残っているか? →「Iがない」 ②オーバーシュートが大きいか? →「Dがない」の2点でP/PI/PD/PIDを見分けられます。
電験三種のPID問題攻略|穴埋め問題で確実に5点取る
📝 頻出パターン:H28 問13のような穴埋め問題
電験三種の機械科目では、PID制御に関する穴埋め問題がよく出題されます。典型的なパターンは以下の通りです。
【典型的な出題例】
「( ア )動作は、偏差に比例した操作量を出力する。
この動作のみでは( イ )が残る欠点がある。
( ウ )動作を加えることで( イ )を除去できる。
この動作は( エ )動作とも呼ばれる。
( オ )動作は偏差の変化速度に応じた操作量を出し、
オーバーシュートを( カ )する。」
✅ 解答と「車の例え」でのイメージ
| 穴 | 解答 | 車で言うと… |
|---|---|---|
| ア | 比例(P) | ズレの大きさに応じてアクセルを踏む |
| イ | 定常偏差(オフセット) | 上り坂で「あと2km/h」が消えない状態 |
| ウ | 積分(I) | 「ずっとちょっと遅い」を覚えてて補正する助手 |
| エ | リセット | 偏差をリセット(ゼロに)するから |
| オ | 微分(D) | 先の信号を見て早めにブレーキ |
| カ | 抑制 | 行き過ぎを防ぐ |
🎯 合格者が使う「PID 3行暗記カード」
🅿️ P=今のズレに比例してアクセル。だが定常偏差が残る
🔄 I=過去のズレを蓄積して補正。定常偏差を消す(リセット動作)
⚡ D=変化速度を先読みしてブレーキ。オーバーシュートを抑制(レート動作)
この3行が「車の運転のイメージ」と一緒に頭に入っていれば、穴埋め問題は反射的に解けます。丸暗記ではなく、イメージで理解することが大切です。
ブロック線図で見るPID制御|全体の流れを確認する
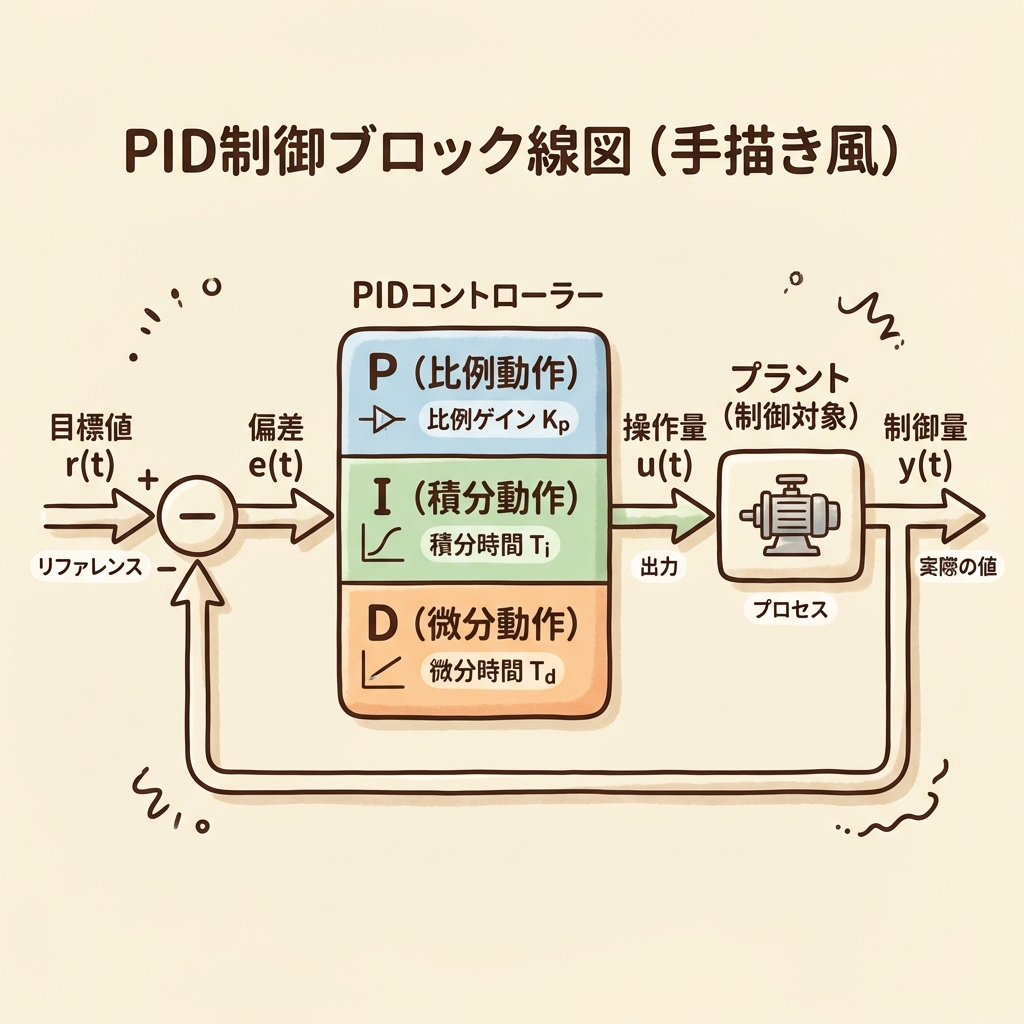
最後に、PID制御の全体像をブロック線図(信号の流れ図)で確認しましょう。電験三種ではブロック線図の読み取り問題も出題されます。
🔧 PID制御のブロック線図(HTML図解)
↑ 制御量 y(t) は検出器を通じて比較器にフィードバックされる(矢印は下から左に回り込む)
信号の流れを言葉で整理すると、次のようになります。
偏差を計算:目標値 r(t) と制御量 y(t) の差 → 偏差 e(t) = r(t) - y(t)
PIDコントローラが操作量を決定:P・I・Dの3つの計算結果を足し合わせて操作量 u(t) を出力
制御対象(プラント)が動く:操作量に応じて温度や速度が変化し、制御量 y(t) が更新される
フィードバック:更新された y(t) が比較器に戻り、STEP 1に戻る → このループが高速に繰り返される

まとめ|PID制御は「今・過去・未来」の3つの目で偏差を見る
✅ P動作(比例)=「今この瞬間のズレ」に比例して操作。応答は速いが定常偏差が残る
✅ I動作(積分)=「過去のズレの蓄積」で補正。定常偏差をゼロにする(=リセット動作)
✅ D動作(微分)=「ズレの変化速度」を先読み。オーバーシュートを抑制する(=レート動作)
✅ PID制御=P+I+Dの組み合わせで、「速く・正確に・安定して」目標値に到達
✅ 電験の穴埋め問題は「定常偏差 → I」「オーバーシュート抑制 → D」「リセット → I」「レート → D」で解ける
PID制御は、電験三種の機械科目で穴埋め問題として頻出します。数式の暗記ではなく、「車の運転」のイメージで直感的に理解しておけば、問題文を読んだ瞬間に答えが浮かぶようになります。
今回の「3人のドライバー」のイメージが、少しでもあなたの合格の助けになれば嬉しいです。
📚 次に読むべき記事
PID制御の土台となるフィードバック制御の全体像を復習。ブロック線図の基本もここで押さえられます。
PID制御は自動制御のどこに位置づけられるのか?制御の全体マップを確認できます。
機械科目の全体像から、PID制御(自動制御分野)がどの程度の配点かも確認。効率的な学習順序がわかります。
🚪 この記事を読んでいるあなたへ
もし今、「このままこの仕事を続けて、何か変わるんだろうか…」と感じているなら、あなたが今やっている電験の勉強は、間違いなくキャリアを変える力を持っています。