- 「電圧制御と界磁制御の違いは?」と問われて、どちらも「速度を変える方法」としか言えない
- 「弱め界磁」という言葉は知っているが、なぜ界磁を弱めると速度が上がるのか説明できない
- 始動抵抗器をなぜ段階的に減らしていくのか、理由がわからない
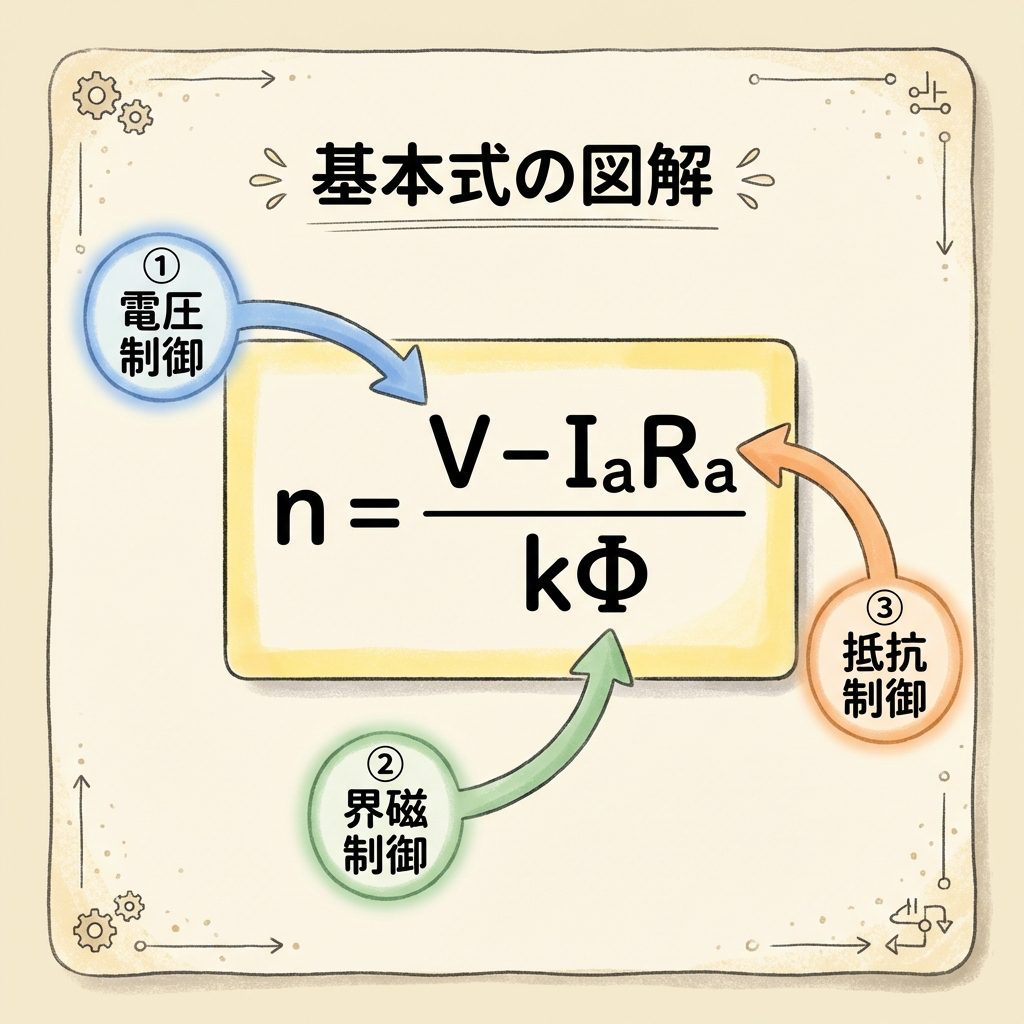
- 回転速度の基本式 n = (V − IaRa)/(kΦ) から「何を変えるか」で3つの制御法が導ける仕組み
- 電圧制御・界磁制御・抵抗制御の特徴・長所・短所の違い
- 「基底速度以下は電圧制御、以上は界磁制御」が瞬時にわかるフローチャート
- 始動抵抗器法の仕組みと段階的に減らす理由
直流電動機の速度制御は、電験三種の機械科目で毎年のように出題される最重要テーマです。「どの制御法か答えよ」という穴埋め問題だけでなく、「この説明は正しいか」という正誤問題でも問われます。この記事では、基本式から制御法を「導く」順番で解説します。丸暗記不要です。
目次
まず「回転速度の式」を押さえる:ここから3つの制御法が全部導ける
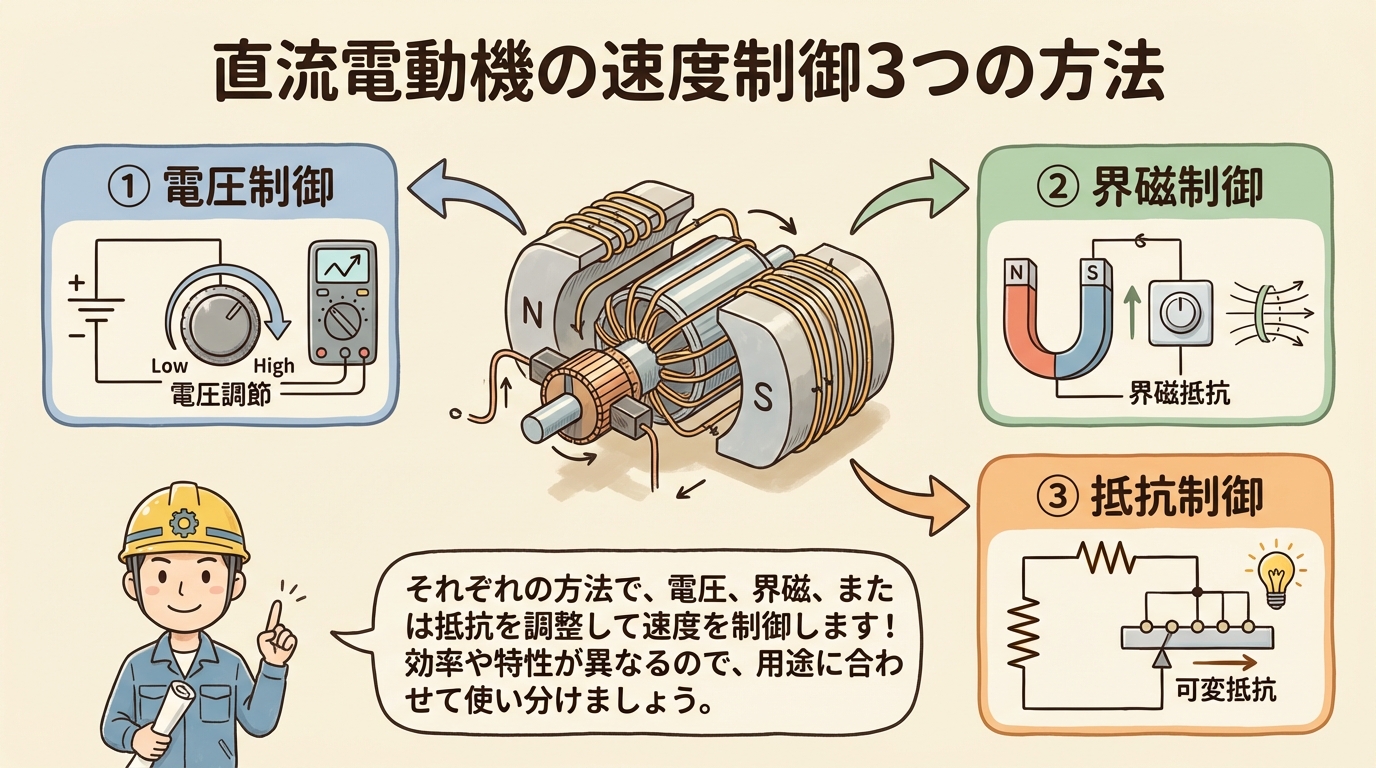
直流電動機の速度制御法は、回転速度nの式を見れば全部わかります。式の中の何を変えるかで、3つの制御法に分かれているだけです。
この式の分子(V − IaRa)と分母(kΦ)のどこを変えるかで、速度制御の方法が決まります。
「nの式の分子(V)を変える→電圧制御」「分母(Φ)を変える→界磁制御」「分子のRaを変える→抵抗制御」。式を見ながら考えれば、暗記しなくても導けます。

3つの速度制御法:比較一覧
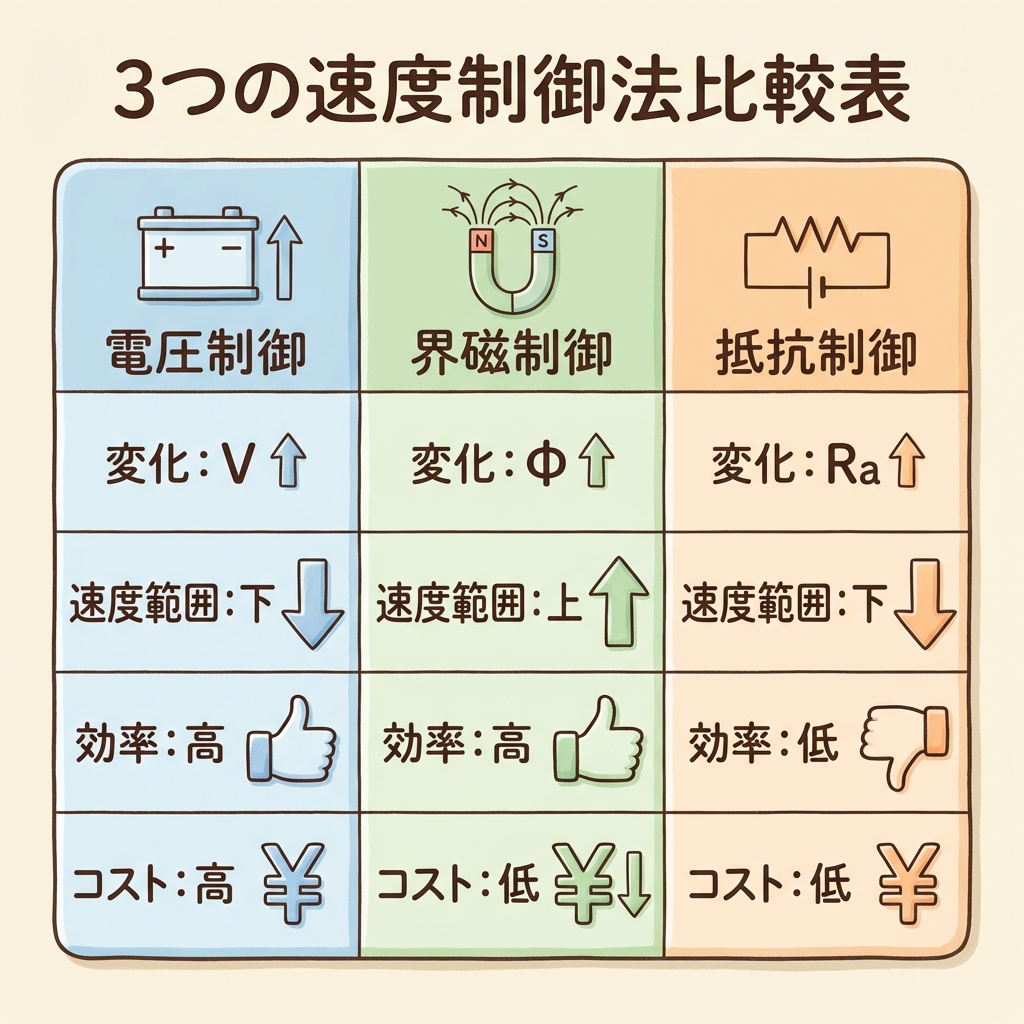
詳細を説明する前に、まず3つの方法の全体像を表で把握しておきましょう。試験直前の見直しにも使えます。
| 項目 | ① 電圧制御 | ② 界磁制御 | ③ 抵抗制御 |
|---|---|---|---|
| 変える量 | 端子電圧 V | 磁束 Φ(界磁電流 If) | 電機子回路の抵抗 R |
| 速度範囲 | 基底速度以下 | 基底速度以上 | 基底速度以下 |
| 効率 | ✅ 高い | ✅ 高い | ❌ 低い(抵抗損失) |
| 設備コスト | 高い | 安い | 最も安い |
| 速度調整率 | ✅ 良い(安定) | ✅ 良い | ❌ 悪い(負荷変動で速度変化) |
| 主な用途 | 精密速度制御 電気機関車・圧延機 |
高速運転 送風機・ポンプ |
簡易な速度制御 クレーン・巻上機 |
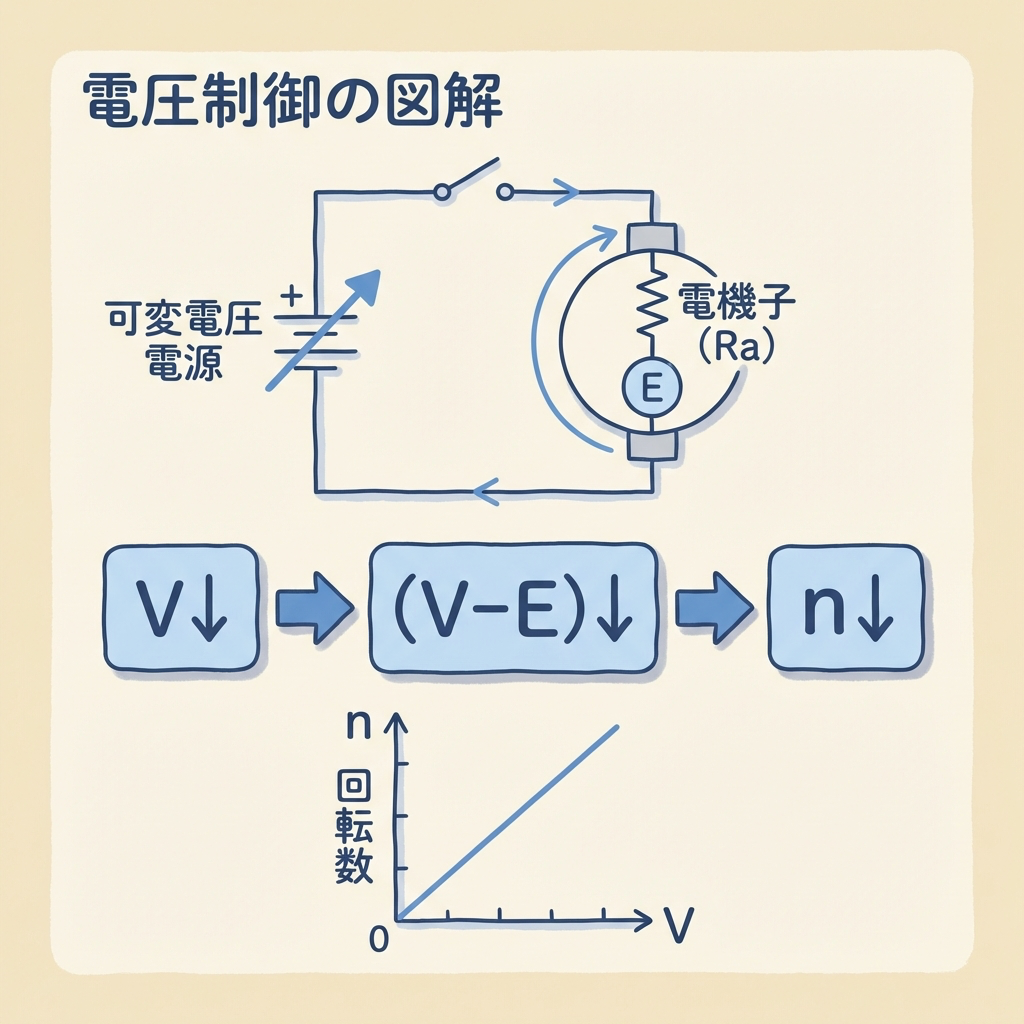
① 電圧制御:基底速度以下を滑らかに制御する
仕組みと速度への影響
端子電圧Vを下げると、逆起電力Eとの差(V − E)が減り、電機子電流Iaが一時的に変化しますが、最終的には回転速度nが下がる方向で落ち着きます。
→ (V − IaRa) が減る
→ n =(V − IaRa)/ kΦ が小さくなる
→ 回転速度 n が低下
ワード・レオナード法とチョッパ制御
別の直流発電機(励磁機)を使って電動機の端子電圧を可変にする方式。設備が大規模になるが、なめらかな制御が可能。製鉄所の圧延機などに使用されてきた。
サイリスタ(またはIGBT)で電圧を高速ON/OFFし、平均電圧を変化させる方式。ワード・レオナード法より小型・高効率で現在の主流。電気自動車にも応用される。
✅ 基底速度(定格電圧・定格界磁での速度)以下を制御
✅ 磁束Φを一定に保つため、トルク一定のまま速度を変えられる
✅ 効率が高く、速度調整率が良い
⚠️ 設備コストが高い
{kind=link}
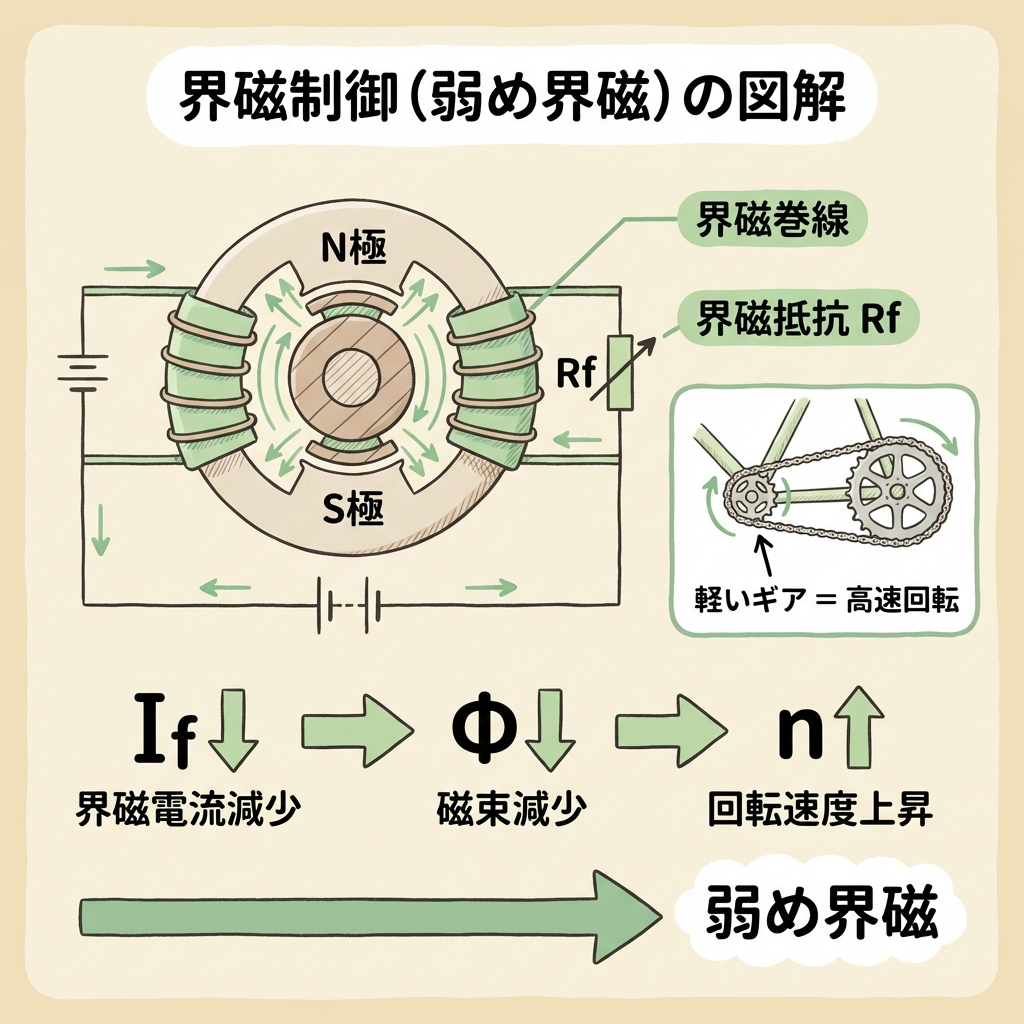
② 界磁制御:「弱め界磁」で基底速度以上に上げる
界磁制御は、3つの中で最も「なぜ?」が問われやすい制御法です。「界磁を弱めるとなぜ速度が上がるのか」を式から説明できるようにしておきましょう。
「弱め界磁で速度が上がる」理由
→ 磁束 Φ が減る
→ 逆起電力 E = kΦn が一時的に減る
→ (V − E) が増える → Ia が増える → トルク T = kΦIa が…
→ Φが減ってもIaが増える → 回転速度 n が上昇して新しい平衡点へ
→ n = (V − IaRa) / kΦ で分母Φが小さい → n が大きくなる
界磁制御は「自転車のギアチェンジ」に似ています。軽いギア(弱め界磁)に変えると、ペダルは重くなるが回転数(ケイデンス)が上がる。重いギア(強め界磁)では、1漕ぎの力は大きいが回転数は低い。電動機も同じで、界磁を弱めるとトルクは下がるが回転速度が上がります。
界磁制御の特徴と注意点
| 速度範囲 | 基底速度(定格)以上〜最高許容速度まで。電圧制御と組み合わせると広範囲の速度制御が可能。 |
| 長所 | 界磁回路は電流が小さい(Ifは小さい)→ 損失が少なく効率が高い。制御機器も小型・安価。 |
| 短所・注意点① | Φを弱めすぎると危険。Φが非常に小さくなると n = (V − IaRa)/(kΦ) の分母が極端に小さくなり、速度が急上昇(暴走)する。最低限の磁束(最大界磁抵抗)は必ず制限が必要。 |
| 短所・注意点② | Φを弱めると電機子反作用が相対的に強くなる。整流が悪化しやすい。 |
| 出力の特性 | 界磁制御では出力P ≒ 一定(定出力制御)。速度が上がるとトルクが下がるが出力は変わらない。電圧制御は定トルク、界磁制御は定出力と覚える。 |
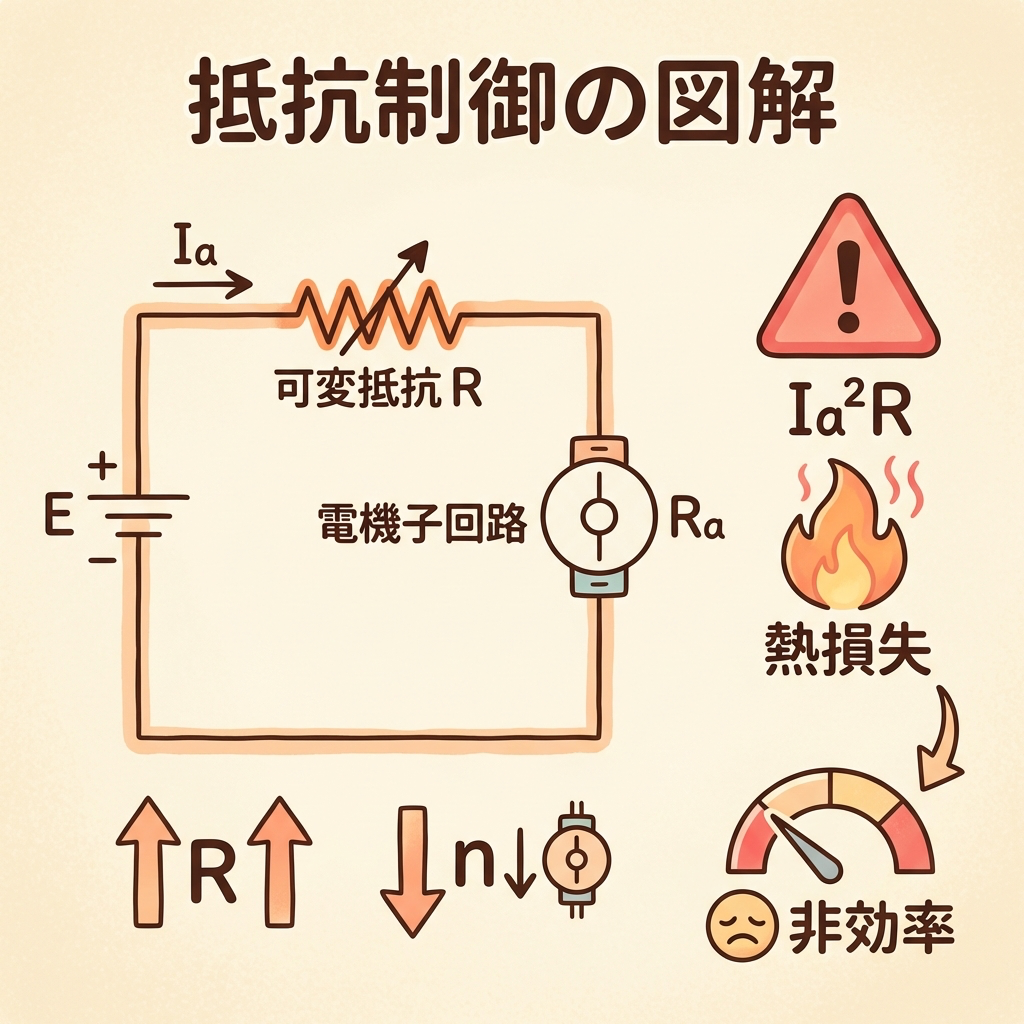
③ 抵抗制御:最も安価だが効率が悪い
抵抗制御は、電機子回路に可変抵抗Rを直列接続して回転速度を下げる方法です。最もシンプルな制御法ですが、抵抗での電力損失が大きく効率が悪いという決定的な欠点があります。
→ 式が n = (V − Ia(Ra + R)) / kΦ になる
→ (Ra + R) が増える → 分子が減る
→ 回転速度 n が低下
- 設備が単純で安価
- 追加する抵抗器だけでよい
- 特別な電源装置が不要
- 抵抗での電力損失 Ia²R が大きく非効率
- 速度調整率が悪い(負荷が変わると速度が大きく変動)
- 低速ほど効率が悪化する
n = (V − Ia(Ra + R)) / kΦ の Ia は負荷によって変わります。直列抵抗Rが大きいほど、負荷電流Iaの変化が回転速度nに与える影響が大きくなります。たとえるなら、ブレーキを踏みながらアクセルを踏んでいる状態。踏む力(負荷)が少し変わるだけで速度が大きく変わります。
「抵抗制御は効率が良い」→ 誤り(抵抗損失があるため効率は悪い)
「抵抗制御で基底速度以上に上げられる」→ 誤り(抵抗制御は速度を下げる方向のみ)
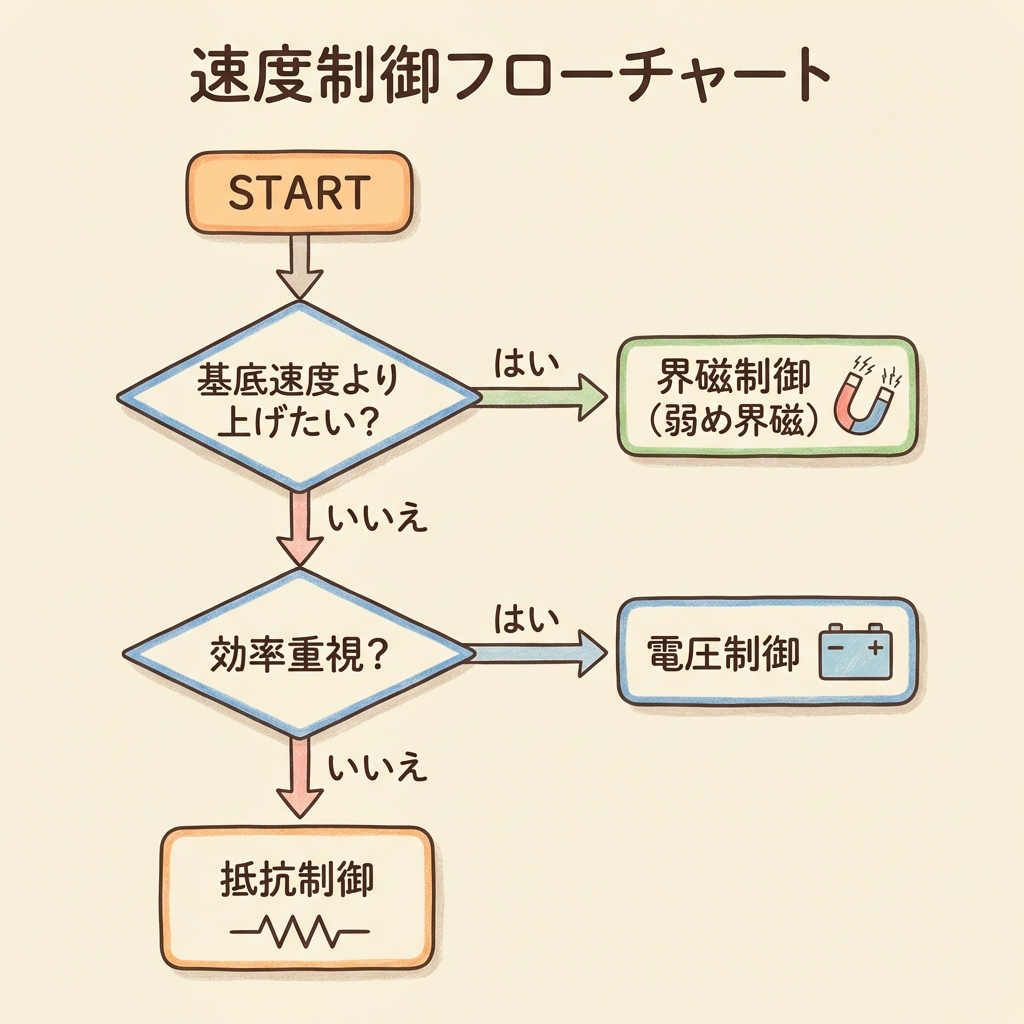
「どの制御法をいつ使うか」フローチャート
試験では「この状況に最適な速度制御法はどれか」という選択問題も出ます。次のフローチャートで整理しておきましょう。
上げたい?下げたい?
(弱め界磁)
界磁抵抗を増やしてIfを減らす
Φ↓ → n↑
定出力制御
Vを下げる
定トルク制御
高効率・高コスト
直列抵抗追加
低効率・低コスト
一時的使用向き
実用的な直流電動機では、基底速度以下:電圧制御(定トルク)+ 基底速度以上:界磁制御(定出力)を組み合わせます。広い速度範囲を高効率で制御できるため、電気機関車や工作機械の主軸に使われています。

始動法:始動抵抗器法|なぜ段階的に減らすのか
始動時の問題:過大電流
直流電動機を始動させる(スイッチを入れる)直後、大電流が流れて巻線を焼損させる危険があります。なぜかを式で確認します。
→ 逆起電力 E = kΦ × 0 = 0(逆起電力がない!)
→ Ia = (V − E) / Ra = V / Ra
→ Raは非常に小さい(0.数Ω)
→ Ia = 定格電流の 10〜20倍の過電流が流れる
①電機子巻線の過熱・焼損
②過大なトルクT = kΦIaによる機械的衝撃(ギア・カップリングの破損)
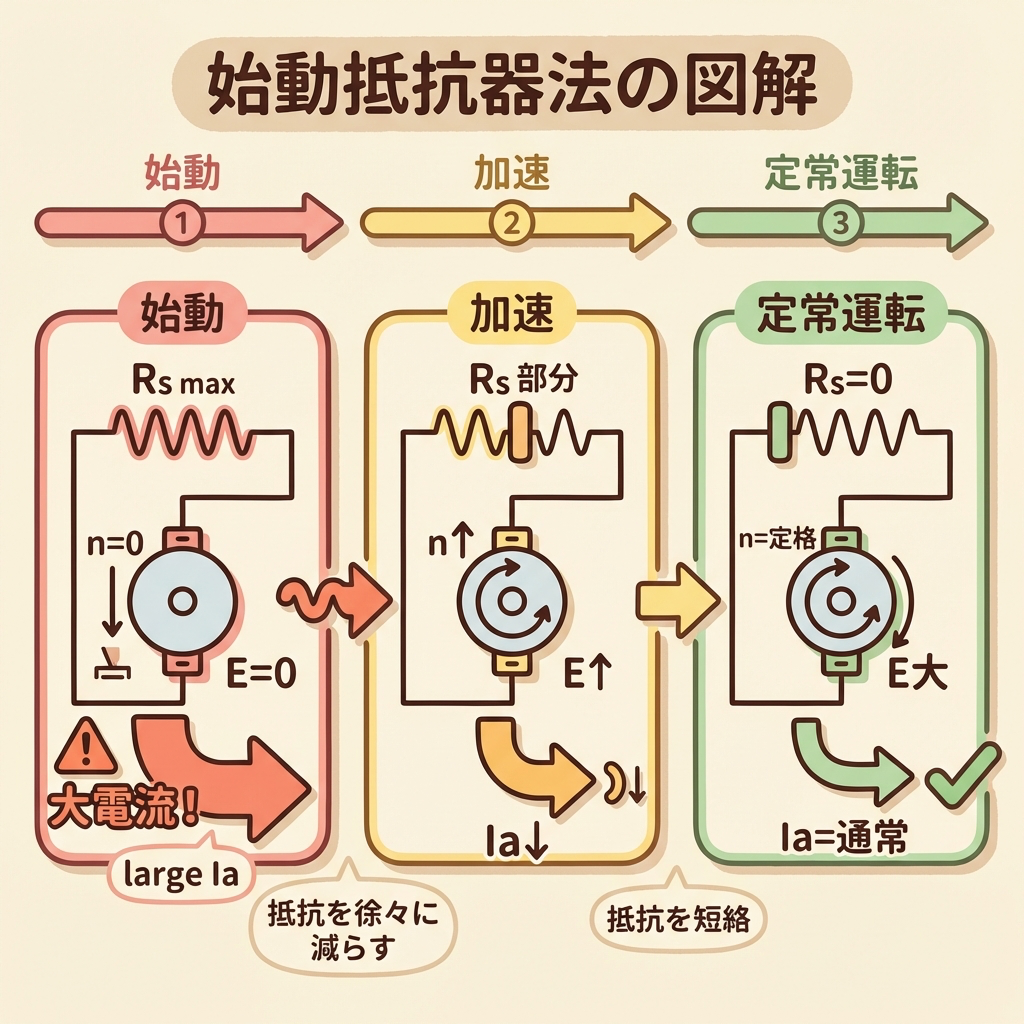
始動抵抗器法の仕組み
始動時に電機子回路へ大きな始動抵抗Rsを直列接続し、電流を制限します。回転が上がってきたら段階的にRsを減らしていきます。
Rs を最大にする → Ia = V/(Ra + Rs) に制限
始動電流 ≒ 定格電流の 1.5〜2倍以下に抑える
n が上がる → E = kΦn が増える → (V − E) が減る → Ia が自然に減る
Ia が小さくなったタイミングで Rs を段階的に短絡(減らす)
Rs = 0(全部短絡)→ 通常の Ia = (V − E)/Ra での運転
逆起電力Eが大きくなりIaが自動的に適切な値になる
Ia(start) = V / (Ra + Rs)
∴ Rs = V/Ia(start) − Ra
例:V = 100V、Ra = 0.5Ω、Ia(start)上限 = 20A の場合
Rs = 100/20 − 0.5 = 5 − 0.5 = 4.5Ω
誘導電動機にもY-Δ始動・始動補償器などの始動法があります。直流電動機の「始動抵抗器法」は、誘導電動機の「直列抵抗始動」に相当するシンプルな方法です。
試験の穴埋め・正誤問題パターン集
「直流電動機の速度を基底速度以上に上げるには( )制御を用い、基底速度以下に下げるには( )制御が効率的である」
→ 界磁 / 電圧
「界磁制御では界磁電流を( )して磁束を( )させることで回転速度を( )させる。この方式を( )制御という」
→ 減少 / 減少(弱め)/ 上昇 / 弱め界磁
「始動時に電機子回路へ( )を直列接続することで始動電流を制限する。回転数の上昇とともに逆起電力Eが( )するため、抵抗を段階的に( )していく」
→ 始動抵抗器(始動抵抗) / 増加 / 短絡(減少)
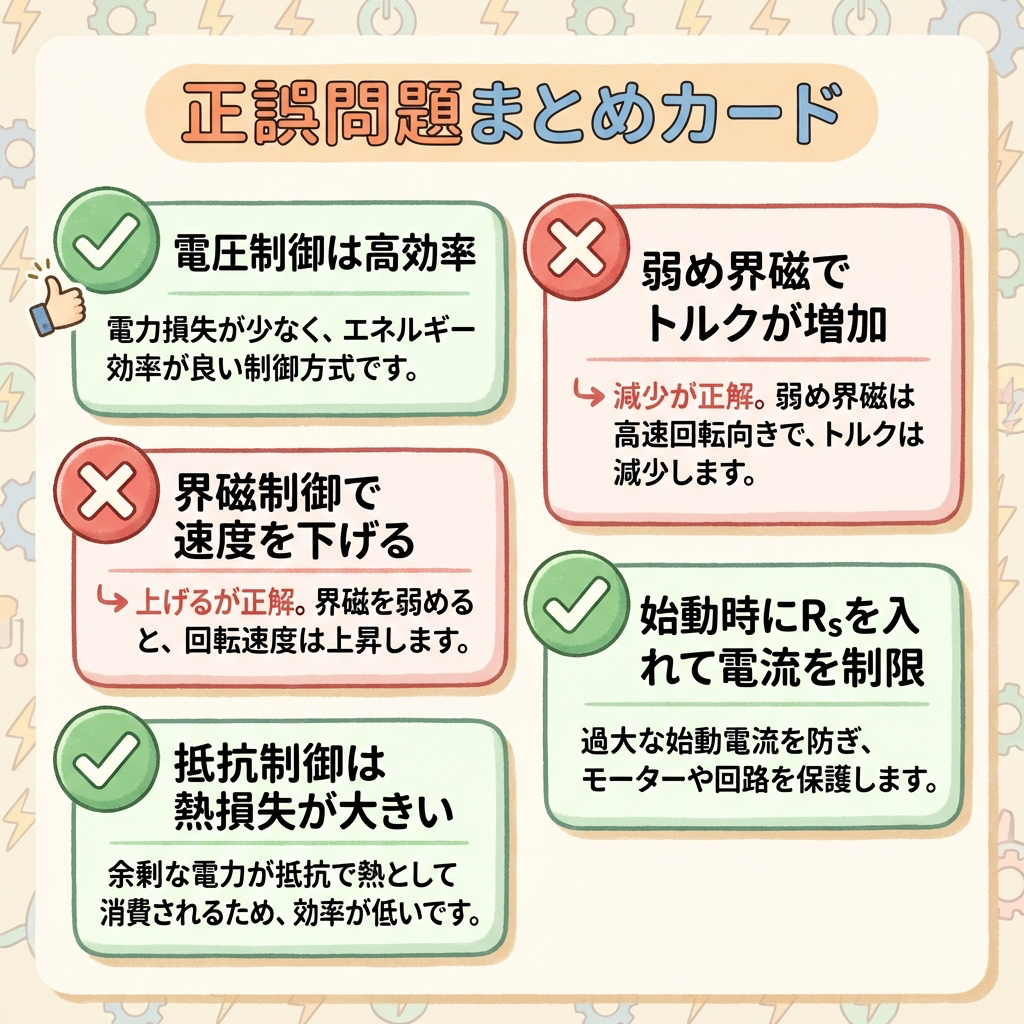
| 問題文 | 正誤 | ポイント |
|---|---|---|
| 「抵抗制御は効率が良い」 | ❌ 誤 | 抵抗での Ia²R 損失で効率は悪い |
| 「界磁制御で基底速度以下に制御できる」 | ❌ 誤 | 界磁制御は基底速度以上。以下は電圧制御 |
| 「電圧制御では定トルク特性が得られる」 | ✅ 正 | Φ一定のまま V を変えるため T = kΦIa でトルク一定 |
| 「始動時は逆起電力が大きいため始動電流が大きい」 | ❌ 誤 | 始動直後は n = 0 なので E = 0。逆起電力がないから大電流 |
| 「界磁制御で界磁電流を増やすと速度が上がる」 | ❌ 誤 | Φ増大 → n の分母増 → 速度は下がる。上げるのは弱め界磁 |
直流機マスターへの道|全9ステップの全体像
直流機の学習は、以下の9ステップで進めるのが最速です。順番を絶対に飛ばさないでください。前のステップを理解していないと、次の記事でつまずきます。特に電機子反作用は「飛ばすと後で必ず詰む」最重要ポイントです。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
まとめ:「nの式の何を変えるか」で全部導ける
| 基本式 | n = (V − IaRa) / kΦ ── 分子のVかRa、分母のΦを変える方法が3種類の制御法 |
| ① 電圧制御 | V↓ → n↓。基底速度以下・定トルク・高効率。サイリスタチョッパが現代の主流 |
| ② 界磁制御 | Φ↓(弱め界磁)→ n↑。基底速度以上・定出力。Φを弱めすぎると暴走に注意 |
| ③ 抵抗制御 | R↑ → n↓。基底速度以下・安価・低効率。速度調整率が悪く一時的用途向き |
| 始動法 | 始動時はE = 0 → 過電流。始動抵抗器を直列接続して制限。nが上がりEが増えたら段階的に短絡 |
| 組み合わせ | 電圧制御(基底速度以下・定トルク)+ 界磁制御(基底速度以上・定出力)が実用最強 |
速度制御法は「n = (V − IaRa)/(kΦ) の何を変えるか」という1本の式から全部導けます。式を見ながら「Vを変える→電圧制御」「Φを変える→界磁制御」と考える習慣をつけると、穴埋め問題も正誤問題もどちらも対応できます。
📚 次に読むべき記事
界磁制御で「弱め界磁が整流を悪化させる」理由の背景。電機子反作用の知識とセットで理解を深めよう。
直流電動機と対比で整理したい誘導電動機の速度制御。「二次抵抗制御」は直流の抵抗制御と同じ発想。
直流機シリーズの前回記事。発電機と電動機の式の違い(V = E ± IaRa)を比較して整理しよう。
【2026年完全版】電験三種の勉強が加速するおすすめグッズ10選 →