- 「目標値」「制御量」「操作量」「偏差」──用語が多すぎて、どれがどれか混乱する
- 「検出部」「比較部」「調節部」「操作部」の違いを聞かれると答えに詰まる
- フィードバック制御のブロック図を見ても、矢印がぐるぐるしていて意味がわからない
- 「負帰還」という言葉がなぜ「負」なのかピンとこない
- フィードバック制御を構成する7つの要素を、すべて「エアコン」の動作に対応させて理解
- 「目標値」「偏差」「操作量」「制御量」「外乱」の違いを30秒で区別できるようになる
- 「検出部」「比較部」「調節部」「操作部」「制御対象」がそれぞれ何をしているかを完全に把握
- 「負帰還」とは何か? なぜ「負」なのか? を直感的に理解
- 電験三種の穴埋め問題で確実に得点するためのキーワード対応表
前回の記事では、自動制御の全体像として「シーケンス制御・フィードバック制御・フィードフォワード制御の3つの違い」を整理しました。
【完全図解】自動制御とは?|シーケンス制御・フィードバック制御・フィードフォワード制御の違いを1枚で整理 →
今回は、その中でも最も重要な「フィードバック制御」の中身を分解していきます。
フィードバック制御は「結果を見て修正し続ける制御」でしたね。では、その「結果を見る」「修正する」という動作は、具体的にどんな部品(要素)がどんな役割分担で行っているのか?
電験三種では、この「構成要素の名前と役割」を問う穴埋め問題が頻出します。用語が多いため丸暗記しようとすると混乱しますが、すべてエアコンの動作に当てはめれば一発で理解できます。
この記事を読み終える頃には、「フィードバック制御のブロック図」を見ても一切迷わなくなるはずです。
目次
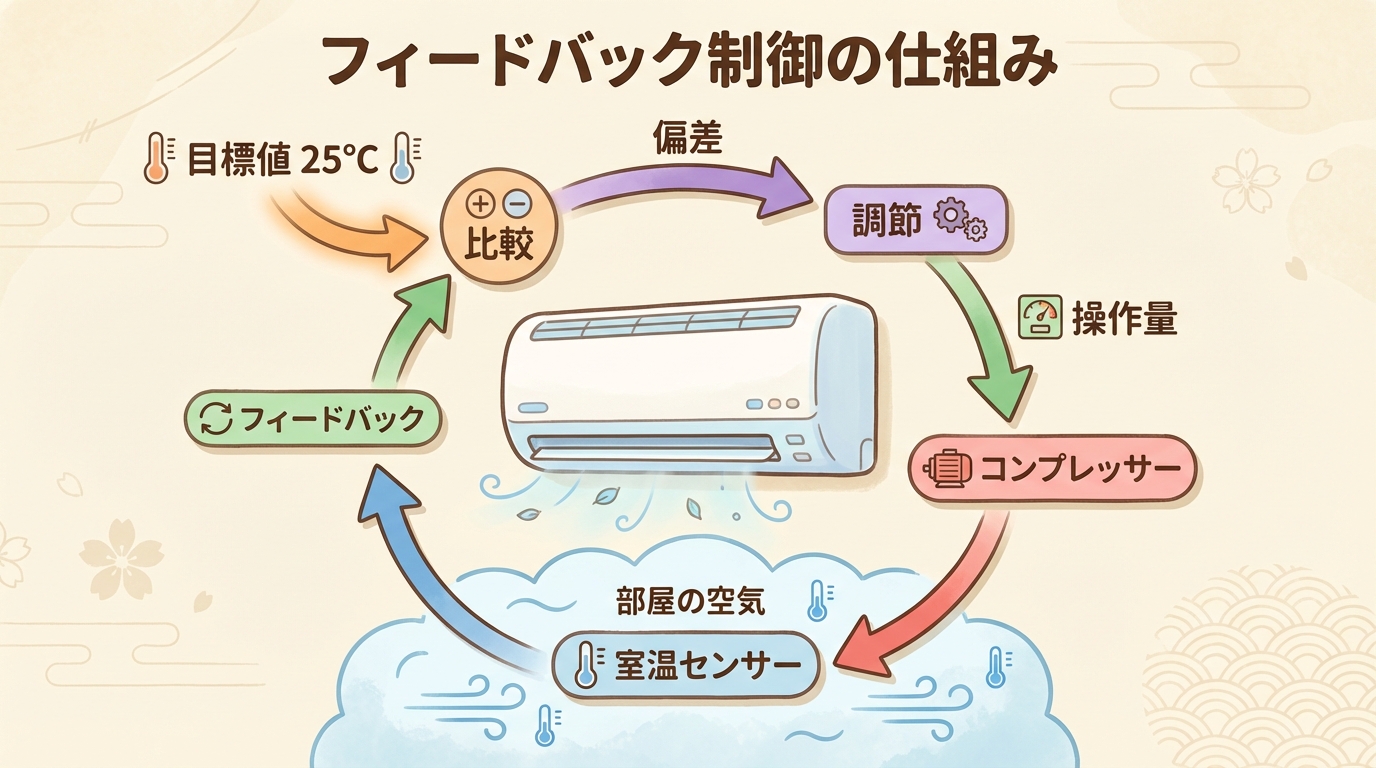
まずは全体像──フィードバック制御の「登場人物」一覧
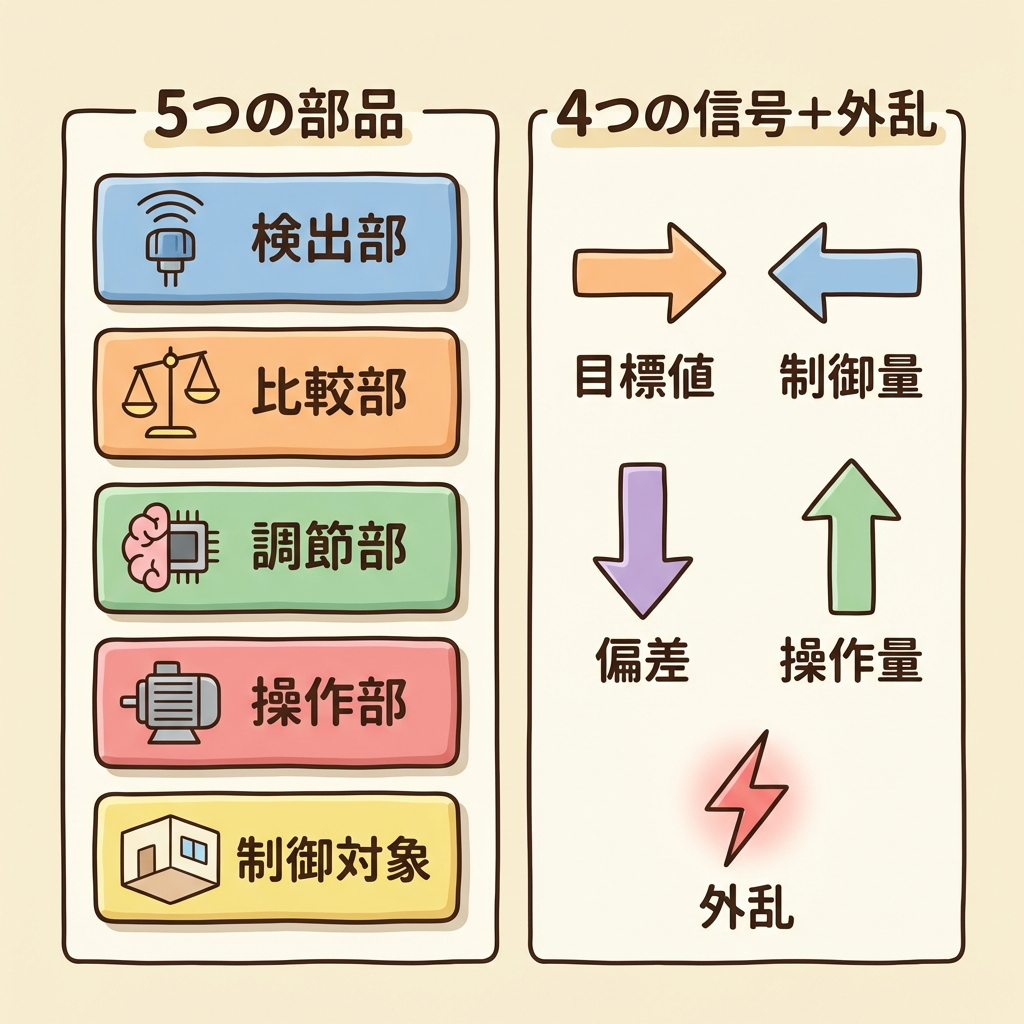
フィードバック制御には、5つの「部品(構成要素)」と4つの「信号(やりとりされる情報)」、そして1つの「邪魔者」が登場します。
まずは名前だけ並べます。この段階では「こんなに覚えるの?」と感じるかもしれませんが、安心してください。次のセクションからすべてエアコンに当てはめます。
5つの構成要素(部品)
| 構成要素 | ひとことの役割 | エアコンでの対応 |
|---|---|---|
| 検出部 | 結果を測る「センサー」 | 室温センサー |
| 比較部 | 目標と結果のズレを計算する | マイコン(差を計算) |
| 調節部 | ズレに応じた「指示」を出す | マイコン(強弱を決定) |
| 操作部 | 指示に従って実際に動く | コンプレッサー・ファン |
| 制御対象 | コントロールしたい「もの」 | 部屋の空気(室温) |
4つの信号 + 1つの邪魔者
| 用語 | 意味 | エアコンでの対応 |
|---|---|---|
| 目標値(設定値) | 「こうなってほしい」値 | 設定温度 25℃ |
| 制御量(出力) | 実際の結果の値 | 実際の室温 28℃ |
| 偏差 | 目標値と制御量の「ズレ」 | 25℃ − 28℃ = −3℃ |
| 操作量 | ズレを直すために加える力 | 冷房の強さ(コンプレッサー出力) |
| 外乱 🔥 | システムを乱す「邪魔者」 | 窓を開ける、人が増える、直射日光 |
用語だけ見ると10個もあるように見えますが、エアコンの動作を思い浮かべれば、すべて「当たり前」のことです。次のセクションで1つずつ、動作の流れに沿って確認していきましょう。
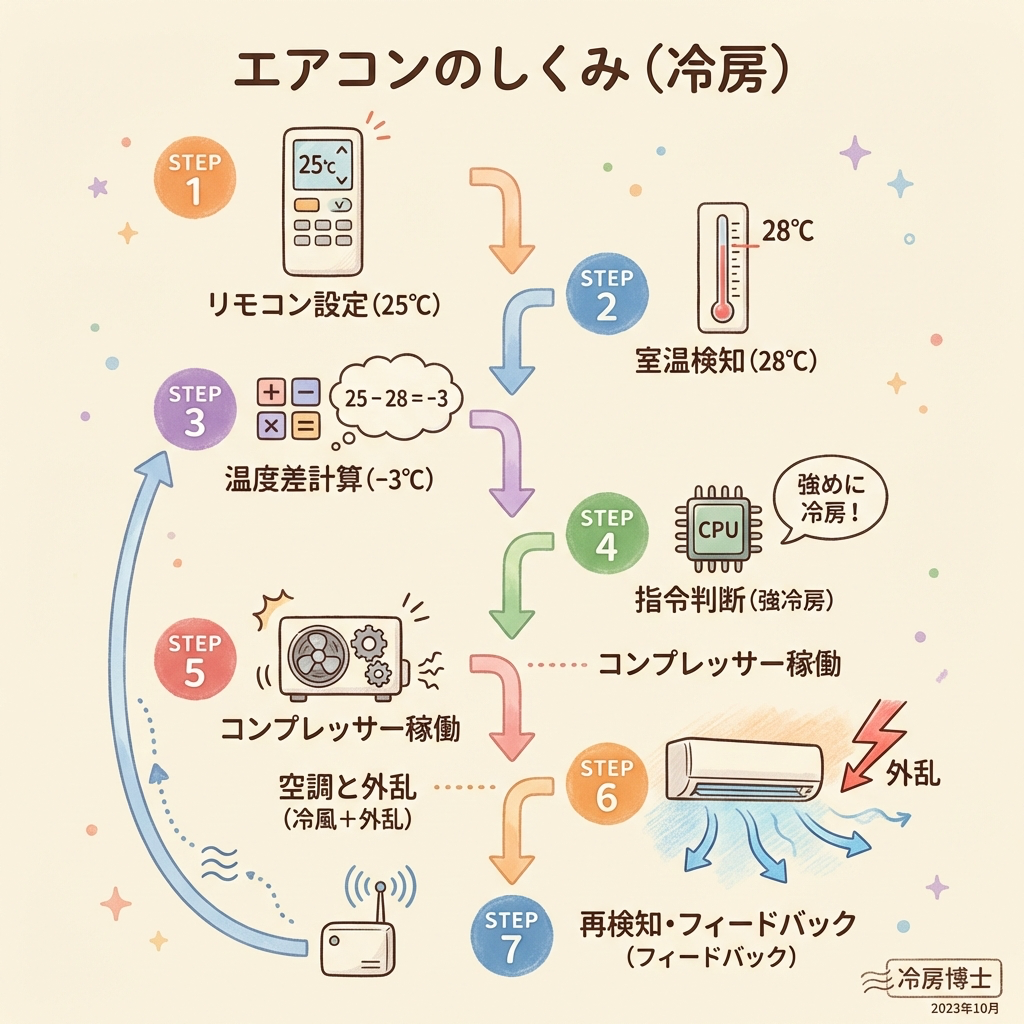
エアコンで追うフィードバック制御の流れ
ここからが本題です。エアコンの冷房運転を例に、信号と構成要素が実際にどう動くかを順番に追っていきます。
あなたがリモコンで「25℃」にセット
この25℃が「目標値(設定値)」です。システムが「こうなってほしい」と目指すゴール地点。
室温センサーが「現在28℃」を検知
この28℃が「制御量(出力)」です。実際に「今どうなっているか」の値。
そして、この値を測る部品が「検出部」(=センサー)です。
目標 25℃ − 現在 28℃ = −3℃
この「−3℃」が「偏差」です。目標値と制御量の差のこと。
偏差を計算する部品が「比較部」です。
偏差がゼロ = 目標どおり = 修正不要、という意味になります。
「−3℃のズレだから、冷房を強めにしよう」と判断
偏差の大きさに応じて、どのくらいの力で修正するかを決めるのが「調節部」です。
エアコンではマイコン(制御IC)がこの役割を担っています。
ここで決まった「冷房の強さ」の指令が「操作量」です。
コンプレッサーがフルパワーで冷媒を圧縮、ファンが冷風を送る
調節部からの指令(操作量)を受けて、物理的にエネルギーを加えるのが「操作部」です。
バルブ、モーター、ヒーターなど「実際に動く部品」が該当します。
冷風が部屋の空気に作用 → 室温が下がり始める
コントロールしたい「もの」そのものが「制御対象」です。エアコンの場合は「部屋の空気」が制御対象。
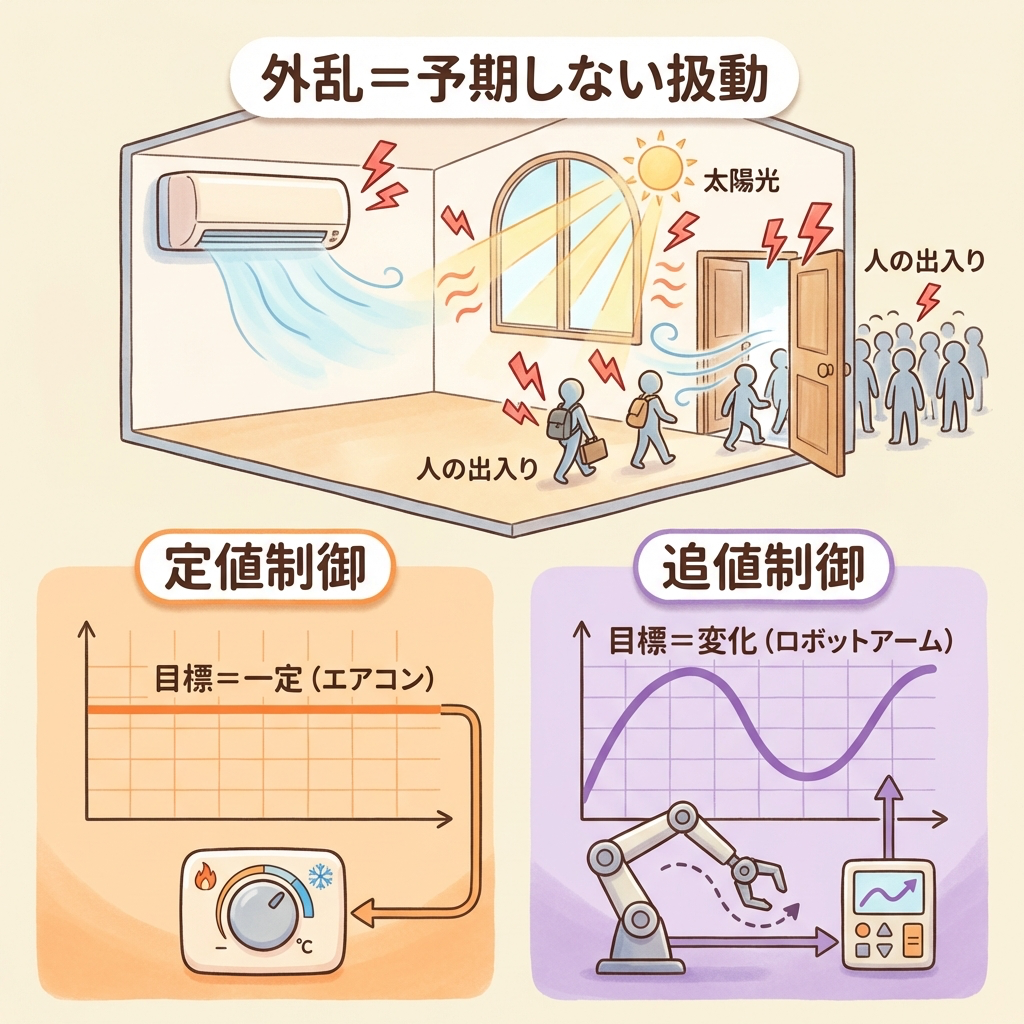
🔥 ここに「外乱」が割り込んでくる!
窓を開けた、人が増えた、直射日光が差し込んだ──こうした想定外の変化が、制御対象に直接影響を与えます。これが「外乱」です。
室温センサーが再び室温を測定 → STEP 2 に戻る
この「結果を入力側に戻す」ループこそが「フィードバック」の本体です。
STEP 2〜7 をひたすら繰り返すことで、室温は25℃に近づき、維持されます。
この7ステップは、フィードバック制御がある限り永遠に繰り返されます。エアコンが動いている間ずっと、「測る → 比べる → 決める → 動かす → 測る → …」が止まりません。これが「閉ループ」と呼ばれる理由です。
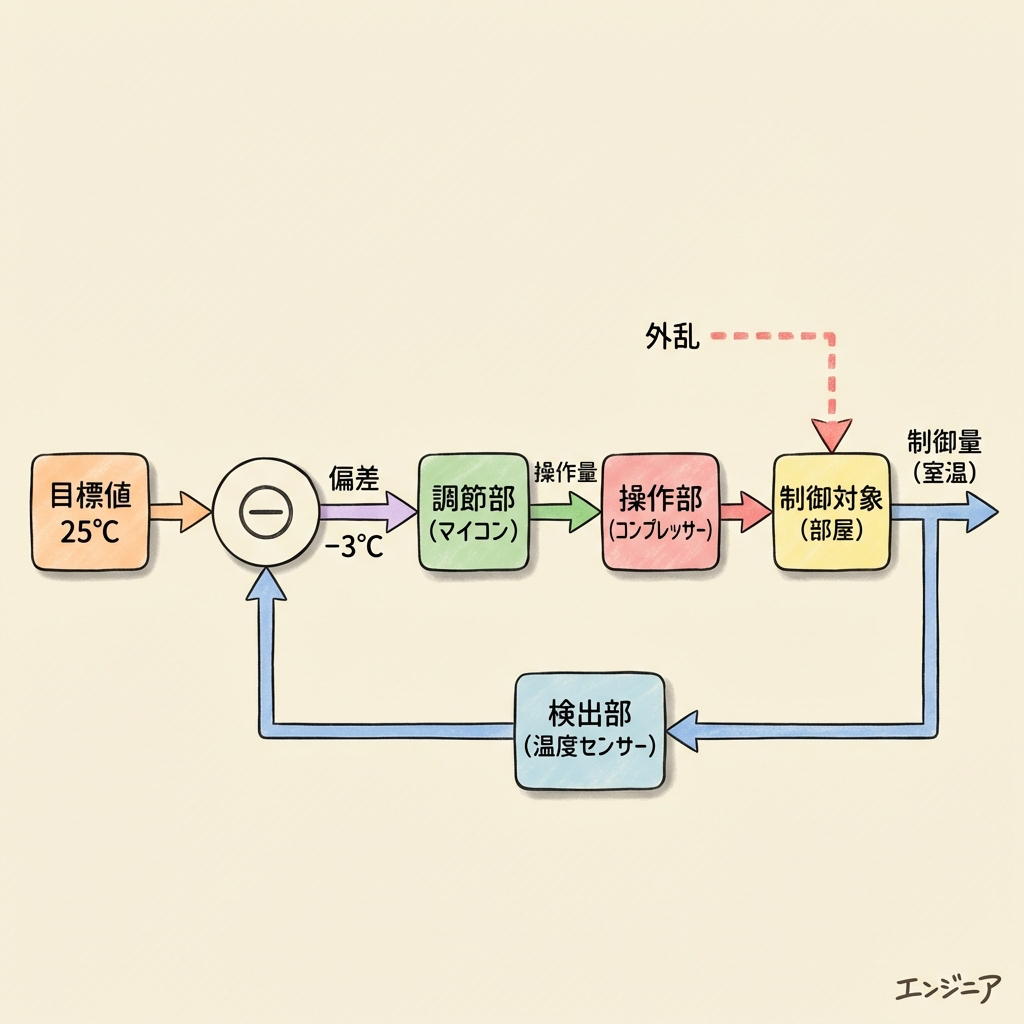
ブロック図で全体を俯瞰する
ここまでの流れを、電験三種の教科書でよく見る「ブロック図」の形に整理します。
ブロック図とは、制御システムの各要素を四角い箱(ブロック)で表し、信号の流れを矢印で示した図のことです。
ブロック図の読み方は、左から右に信号が流れると覚えてください。そして右端の「制御量」が、下のフィードバック経路を通って左の比較部(⊖マーク)に戻ります。
ブロック図の中にある⊖マークは「比較部」を表します。目標値から制御量(フィードバック信号)を引き算することで偏差を求めています。この「引き算」が後で説明する「負帰還(ネガティブフィードバック)」の正体です。
{kind=link}
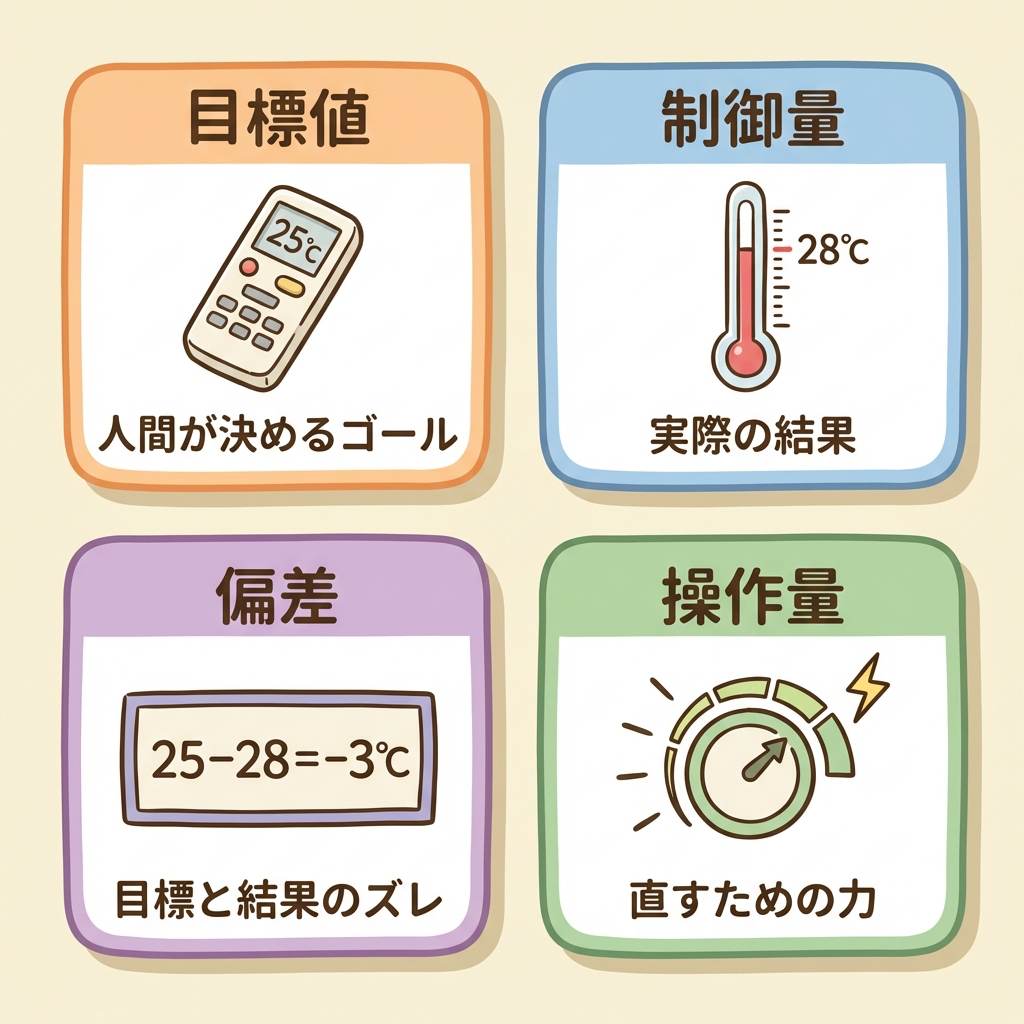
「目標値」「偏差」「操作量」「制御量」を完全に区別する
電験三種の穴埋め問題で最も出題頻度が高いのが、この4つの信号の区別です。似た名前が並ぶので混乱しやすいですが、エアコンに当てはめれば一瞬で見分けがつきます。
4つの信号を「1つの質問」で区別する
それぞれの信号は、「いつ・どこで発生するか」で一発で区別できます。
| 信号名 | どこにある? | エアコンでは | 区別のコツ |
|---|---|---|---|
| 目標値 | ブロック図の一番左(入力側) | 設定温度 25℃ | 人間が決める「ゴール」 |
| 制御量 | ブロック図の一番右(出力側) | 実際の室温 28℃ | 制御の「結果」 |
| 偏差 | 比較部の出力(⊖の直後) | 25℃ − 28℃ = −3℃ | 目標値と制御量の「差」 |
| 操作量 | 調節部の出力(操作部への指令) | 冷房の強さの指令値 | 偏差を直すための「力の大きさ」 |
「操作量」と「制御量」は名前が似ているので要注意
この2つはよく混同されます。区別のポイントはシンプルです。
操作量
「直すための力」
コンプレッサーへの電力指令
ブロック図では調節部→操作部の間にある
制御量
「結果そのもの」
実際の室温
ブロック図の一番右(出力)にある
ボイラーの温度制御で言えば、操作量 = バルブの開度(蒸気の量)、制御量 = 実際の炉内温度です。操作量は「蒸気をどれだけ送るか」という指令、制御量は「炉の中が実際に何度になったか」という結果。この2つは完全に別物です。
「負帰還」とは何か?──なぜ「負」なのか
フィードバック制御の話では必ず「負帰還(ふきかん)」という用語が出てきます。英語では「ネガティブフィードバック(Negative Feedback)」です。
「負」という字が入っているので難しそうに見えますが、実はすでに理解しています。
「負」の意味 = 引き算のこと
なぜ引き算をするのか? それは「ズレを打ち消す方向に動かしたい」からです。
偏差 = 25℃ − 28℃ = −3℃(マイナス)
→ 「下げる方向(冷房を強くする)」に動く → 室温が下がる → ズレが縮まる
偏差 = 25℃ − 22℃ = +3℃(プラス)
→ 「上げる方向(冷房を弱くする/暖房に切替)」に動く → 室温が上がる → ズレが縮まる
どちらの場合も、ズレを「打ち消す(小さくする)」方向に動くのが負帰還です。
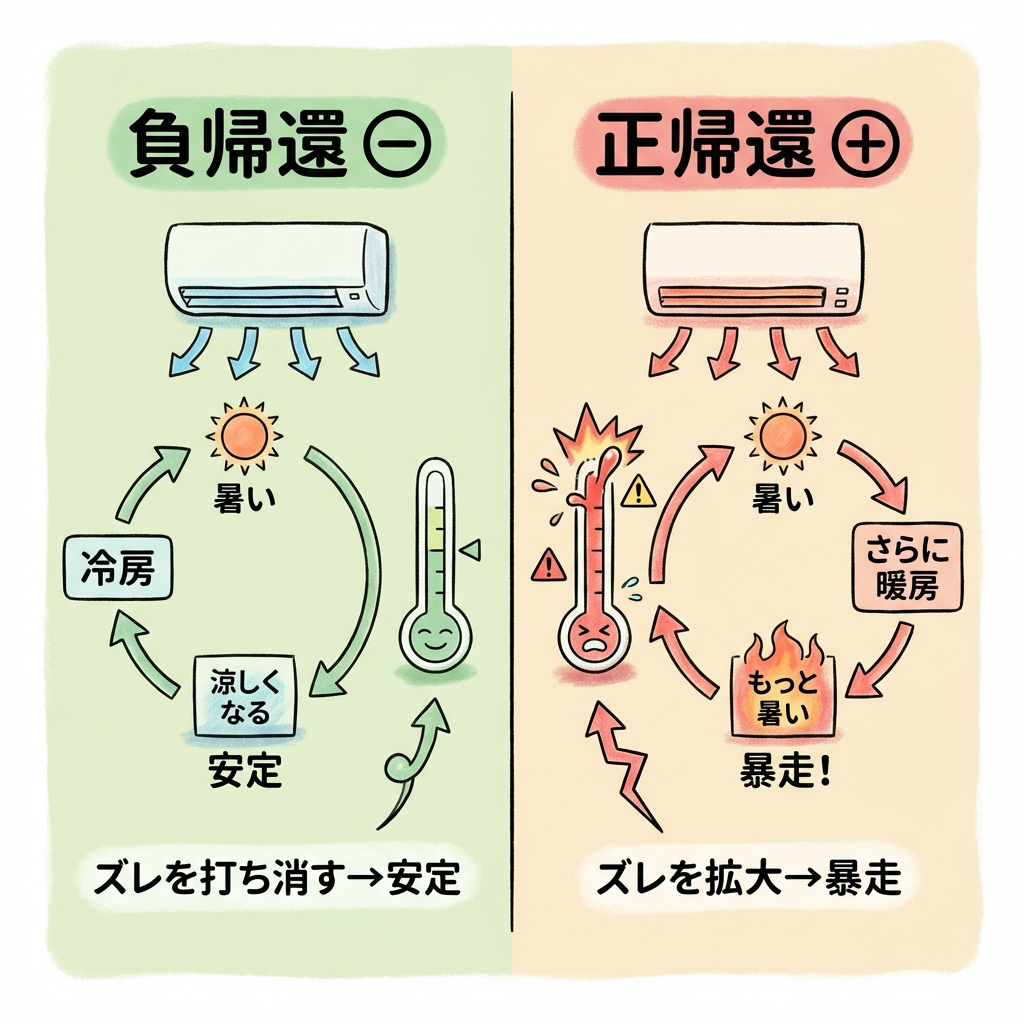
もし「正帰還」だったらどうなる?
逆に、引き算ではなく足し算をしてしまったら?
⊖ 負帰還(引き算)
室温が高い → 冷房を強くする → 室温が下がる
ズレを打ち消す方向に動く
→ 安定する ✅
⊕ 正帰還(足し算)
室温が高い → さらに暖房する → もっと室温が上がる
ズレを拡大する方向に動く
→ 暴走する ❌
正帰還だと「暑いのにさらに暖房する」という地獄の状態になり、システムは暴走・発振してしまいます。
負帰還 = ズレを打ち消す方向にフィードバック → 安定する
正帰還 = ズレを拡大する方向にフィードバック → 暴走する
フィードバック制御で使うのは、ほぼ100%「負帰還」
「フィードバック制御は負帰還(ネガティブフィードバック)を基本とする」──これは正誤問題で頻出です。答えは「正しい」。
比較部の⊖記号は「目標値 − フィードバック信号」という引き算を表しています。
外乱とは何か?+ 定値制御・追値制御の違い
「外乱」──制御を邪魔する想定外の変化
外乱(がいらん)は、システムに外部から加わる、意図しない変化のことです。
エアコンの例では、以下がすべて外乱です。
| 外乱の例 | 室温への影響 |
|---|---|
| 窓を開けた | 外気が入り込み、室温が変化する |
| 人が大勢入ってきた | 体温で室温が上がる |
| 直射日光が差し込んだ | 放射熱で室温が上がる |
| 外気温が急に下がった | 壁を通じて室温が下がる |
外乱はブロック図では、制御対象に直接作用する矢印として描かれます。操作部→制御対象のルートとは別に、横から割り込んでくるイメージです。
フィードバック制御の強みは、外乱が起きても、結果(制御量)を見て自動で修正できること。ただし「結果が変わってから対応する」ため、必ずタイムラグが発生します。
定値制御と追値制御
フィードバック制御は、目標値が固定か変化するかによって2つに分類されます。これも電験三種で問われるポイントです。
定値制御
目標値が一定
例:エアコンを「25℃」に固定
目標は変わらず、外乱に対して制御量を一定に保つ
キーワード:「定値」「一定に保つ」「レギュレータ」
追値制御(サーボ機構)
目標値が時間とともに変化する
例:ロボットアームが動く軌道を追跡
目標の変化に追従するように制御量を動かす
キーワード:「追値」「追従」「サーボ」
目標値が固定 → 定値制御(エアコンの温度設定のように「25℃を維持」)
目標値が変化 → 追値制御(ロボットアームのように「動くターゲットを追いかける」)
日常のフィードバック制御のほとんどは定値制御です。

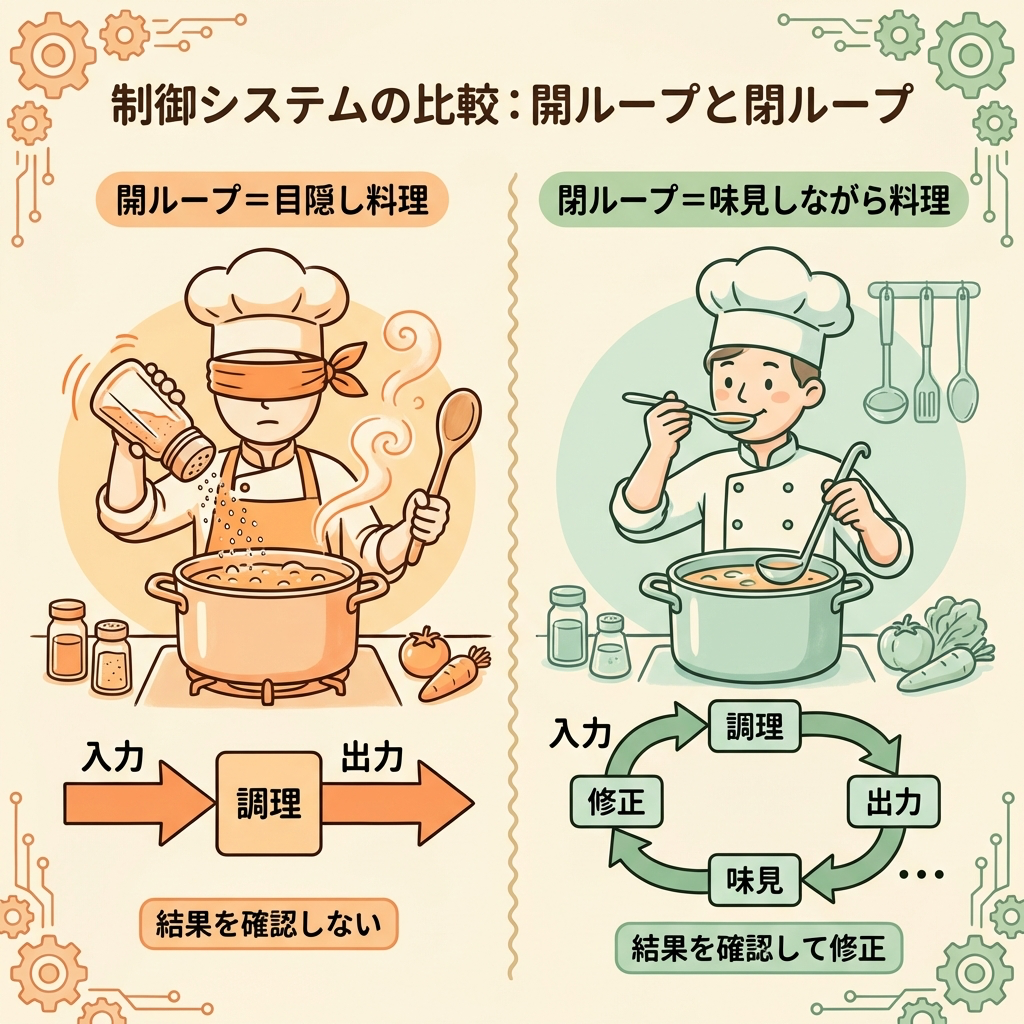
開ループと閉ループ──なぜ「閉じている」と安定するのか
前回の記事で「開ループ・閉ループ」の概念は紹介しました。ここでは、フィードバック制御の構成要素を踏まえた上で、もう一段深く理解します。
開ループ = 「目隠しで料理する」
味見をしない料理を想像してください。レシピ通りに調味料を入れて、出来上がった料理を食べてみたら「塩辛い!」──でも、もう修正できません。
開ループ制御は、結果を確認しないまま動き続けるので、ズレが起きても気づけません。
閉ループ = 「味見しながら料理する」
一方、味見をしながら料理すれば、「ちょっとしょっぱいな」と思ったら水を足せるし、「まだ薄いな」と思ったら調味料を追加できます。
閉ループ制御は、常に結果を確認して修正し続けるので、外乱(予想外のこと)が起きても対応できます。
| 比較項目 | 開ループ | 閉ループ |
|---|---|---|
| たとえ | 目隠しで料理 | 味見しながら料理 |
| 結果の確認 | しない | する(センサーで測定) |
| 外乱への対応 | ❌ できない | ⭕ 自動で修正 |
| 構造 | シンプル・安価 | 複雑・センサーが必要 |
| 安定性 | 外乱に弱い | 負帰還により安定 |
| 代表例 | 洗濯機、信号機 | エアコン、クルーズコントロール |
閉ループ制御は万能ではありません。フィードバックの設計を間違えると「発振(ハンチング)」が起きます。これは「冷やしすぎ → 温めすぎ → 冷やしすぎ…」とオーバーシュートを繰り返す不安定な状態です。この対策がPID制御などの「調節方法」につながります。
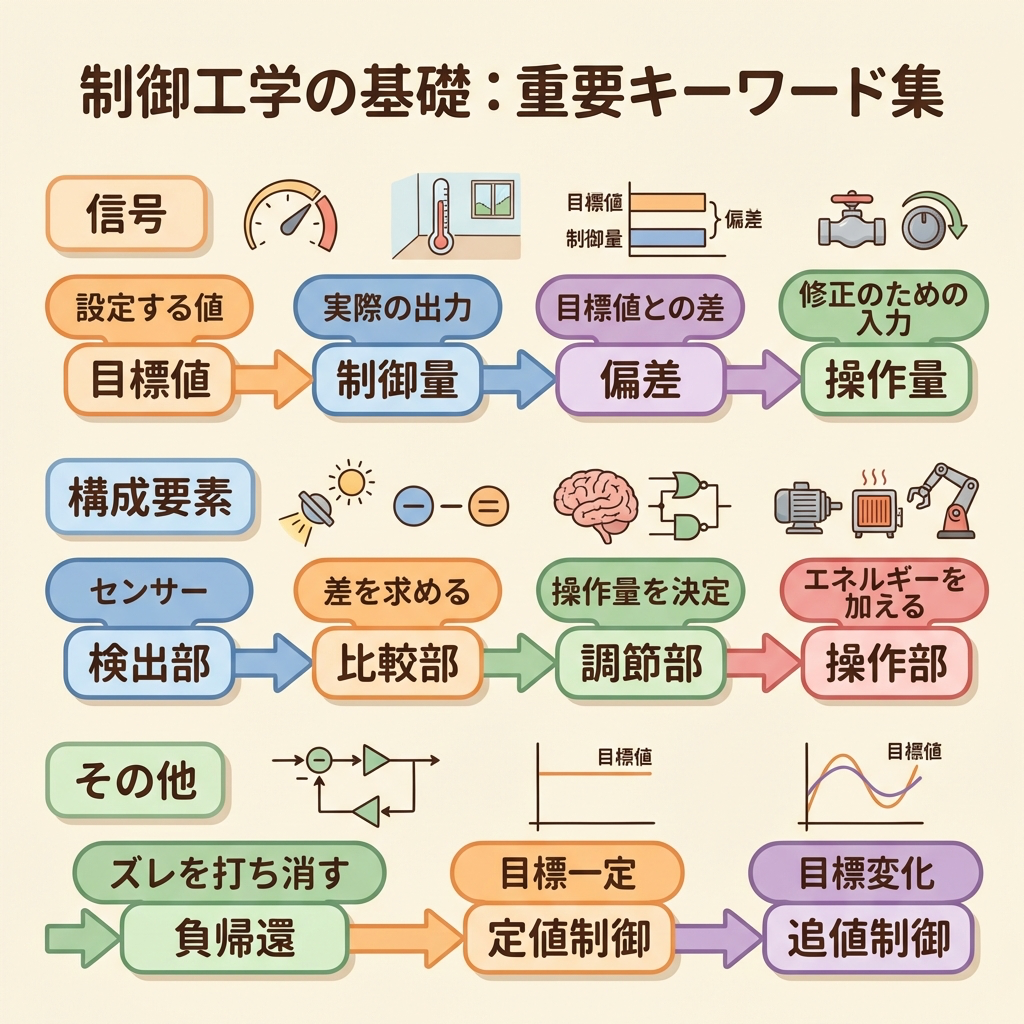
穴埋め問題で使える「キーワード対応表」
電験三種の機械科目では、フィードバック制御の構成要素を問う穴埋め問題が頻出します。問題文に登場するキーワードと、正解の用語を対応させた「カンニングペーパー」を用意しました。
信号のキーワード対応表
| 問題文のキーワード | 正解の用語 |
|---|---|
| 「こうあってほしい値」「設定する値」「基準」 | → 目標値(設定値) |
| 「実際の出力」「制御の結果」「被制御量」 | → 制御量 |
| 「目標値との差」「ズレ」「差信号」 | → 偏差 |
| 「制御対象に加える量」「修正のための入力」 | → 操作量 |
| 「システムを乱す」「想定外の変化」「擾乱」 | → 外乱 |
構成要素のキーワード対応表
| 問題文のキーワード | 正解の用語 |
|---|---|
| 「出力を測定する」「センサー」「計測」 | → 検出部 |
| 「目標値と比較」「差を求める」「引き算」 | → 比較部 |
| 「偏差に基づいて操作量を決定」「制御則」 | → 調節部(コントローラ) |
| 「制御対象にエネルギーを加える」「バルブ」「アクチュエータ」 | → 操作部 |
| 「制御される対象」「プロセス」「プラント」 | → 制御対象 |
その他の頻出キーワード
| キーワード | 意味 |
|---|---|
| 負帰還(ネガティブフィードバック) | ズレを打ち消す方向にフィードバックすること。フィードバック制御の基本 |
| 定値制御(レギュレータ) | 目標値を一定に保つフィードバック制御 |
| 追値制御(サーボ機構) | 変化する目標値に追従させるフィードバック制御 |
| 閉ループ | 出力を入力側に戻す(フィードバックする)制御系。フィードバック制御と同義 |

よくある質問(FAQ)
Q1. 「比較部」と「調節部」は同じマイコンの中にあるのでは?区別する意味はありますか?
実際のエアコンでは、比較部と調節部は1つのマイコンの中で処理されています。しかし、ブロック図では「機能」ごとに分けて描くのがルールです。「ズレを求める」と「どう直すか決める」は論理的に異なるステップなので、試験では別々の要素として問われます。
Q2. 偏差がゼロなら操作量もゼロになりますか?
必ずしもそうではありません。例えば、エアコンで室温が25℃に達しても、外が暑ければ「弱い冷房を維持する」必要があります。偏差がゼロでも、現状維持のために一定の操作量が必要な場合があるのです。これはPID制御の「積分動作(I動作)」と関連するテーマです。
Q3. 「フィードバック信号」と「制御量」は同じものですか?
ほぼ同じですが、厳密には検出部を通った後の信号がフィードバック信号です。センサーに誤差がなければ制御量と一致しますが、実際にはセンサー自体にも測定誤差があるため、完全に同じとは限りません。試験では「制御量を検出部で測定し、フィードバック信号として比較部に戻す」という表現が正確です。
Q4. この記事の内容だけで電験三種の問題は解けますか?
フィードバック制御の「分類と構成要素」に関する穴埋め・正誤問題は、この記事の内容で十分に解けます。ただし、電験三種ではこの先にブロック線図の等価変換や伝達関数の計算が出題されます。それらは本シリーズの次の記事で解説していきます。

まとめ
✅ この記事のポイント
❶ フィードバック制御の5つの構成要素
検出部(センサー)→ 比較部(ズレを計算)→ 調節部(指示を出す)→ 操作部(実際に動く)→ 制御対象(コントロールしたいもの)
❷ 4つの信号 + 外乱
目標値(ゴール)、制御量(結果)、偏差(ズレ)、操作量(修正力)、外乱(邪魔者)
❸ 偏差 = 目標値 − 制御量
ゼロなら目標どおり、プラスなら足りない、マイナスなら行きすぎ
❹ 負帰還(ネガティブフィードバック)
ズレを打ち消す方向にフィードバックすること。フィードバック制御の基本原理
❺ 定値制御 vs 追値制御
目標値が固定 → 定値制御(エアコン)、目標値が変化 → 追値制御(ロボットアーム)
❻ すべてエアコンで理解できる
目標値=設定温度、検出部=温度センサー、制御量=室温、操作量=冷房の強さ、外乱=窓を開ける
フィードバック制御の構成要素は、電験三種の機械科目でほぼ毎年出題される最重要テーマです。
この記事でエアコンとの対応を理解しておけば、穴埋め問題は「あ、これは調節部のことだな」「これは偏差のことだな」と瞬時に判断できるようになります。
次のステップでは、このブロック図を数式で表現する「伝達関数」の世界に進みます。
📚 次に読むべき記事
自動制御シリーズのハブ記事。3つの制御方式の全体像を把握できます。
電験三種の全体戦略を知りたい方はこちら。
学習効率を上げる環境づくりのヒントが満載です。
💭 この記事を読んでいるあなたへ
制御工学の勉強をしているということは、きっと電験三種の合格を目指して頑張っているのだと思います。もし「このまま今の会社で勉強を続けて意味があるのかな」と感じることがあるなら、それは前に進もうとしている証拠です。
→ 「電験三種で人生変わる」は本当か?年収・転職・キャリアの変化をデータで証明する