
 / Ns の公式、意味がわからない... 滑りが0とか1とか、イメージできない &){kind=link}
💭 こんな悩みはありませんか?
- 「滑り」って何?モーターが滑るの?
- s = (Ns - N) / Ns の公式、意味がわからない...
- 滑りが0とか1とか、イメージできない
✅ この記事の結論
滑りとは「回転磁界にどれだけ置いていかれているか」を表す数値です。犬が飼い主を追いかけるイメージで、すべてが理解できます!
📚 誘導機シリーズ(全8回)
2-1 原理 → 2-2 滑り → 2-3 比例推移 → 2-4 トルクと出力 → 2-5 等価回路 → 2-6 始動法 → 2-7 速度制御 → 2-8 単相誘導電動機
🔙 前回のおさらい
三相誘導電動機では、回転子(ロータ)は回転磁界を追いかけます。でも絶対に追いつけないんでしたね。追いついたら誘導がなくなり、力が消えてしまうから。
目次
🐕 滑りとは?|犬と飼い主でイメージ!
滑り(すべり)を理解するには、犬と飼い主の追いかけっこをイメージするのが一番です!

飼い主と犬の関係 = 回転磁界と回転子の関係
🏃
飼い主
= 回転磁界(Ns)
常に一定速度で走る
🐕
犬
= 回転子(N)
飼い主を追いかける
📏
距離の差
= 滑り(s)
どれだけ置いていかれたか
飼い主が時速10kmで走っていて、犬が時速9kmで追いかけているとします。
この場合、犬は飼い主より10%遅れていることになりますよね。
この「10%の遅れ」が滑り s = 0.1(10%)ということなんです!
📐 滑りの公式
公式を覚えよう!
s = (Ns − N) / Ns
| 記号 | 意味 | イメージ |
|---|---|---|
| s | 滑り(slip) | 遅れの割合(0〜1) |
| Ns | 同期速度 [min⁻¹] | 🏃 飼い主の速度 |
| N | 回転子の速度 [min⁻¹] | 🐕 犬の速度 |
💡 公式を分解してみよう!
Ns − N = 飼い主と犬の速度差(どれだけ置いていかれたか)
÷ Ns = 飼い主の速度で割る(割合にする)
= s = 遅れの割合!
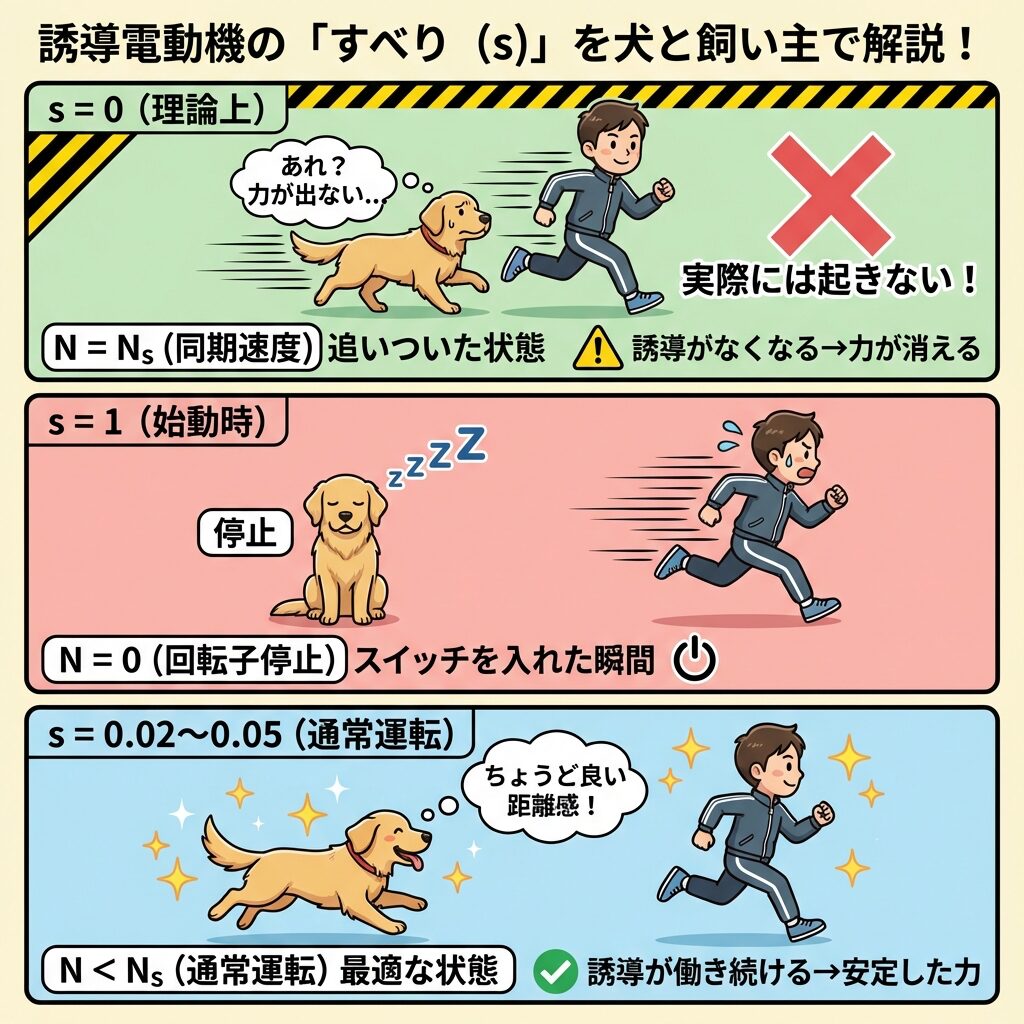
🎯 滑りの値と意味|3つの状態を理解しよう
滑り s の値によって、モーターの状態が変わります。これを犬と飼い主でイメージしてみましょう!
① s = 0(滑りゼロ):追いついた!
🏃🐕
並んで走っている
N = Ns(回転子が同期速度に追いついた)
⚠️ でも実際にはありえない!
追いついたら誘導がなくなり、力が消えてしまう
② s = 1(滑り100%):完全に止まっている!
🏃♂️💨 🐕💤
飼い主だけ走っている
N = 0(回転子が停止している)
📍 これは始動時(スイッチを入れた瞬間)
まだ回転子が動き始めていない状態
③ s = 0.02〜0.05(通常運転):ちょっとだけ遅れて追いかけている
🏃♂️ 🐕
少し後ろを追いかけている
N ≒ Ns(ほぼ同期速度)
✅ これが普通の運転状態!
2〜5%だけ遅れて安定して回転している
📊 滑りの値まとめ
| 滑り s | 状態 | イメージ |
|---|---|---|
| s = 0 | 同期速度(理論上) | 🏃🐕 並走(実際はありえない) |
| s = 1 | 停止(始動時) | 🏃💨 🐕💤 犬は寝てる |
| s = 0.02〜0.05 | 通常運転 ✅ | 🏃 🐕 少し後ろを追走 |
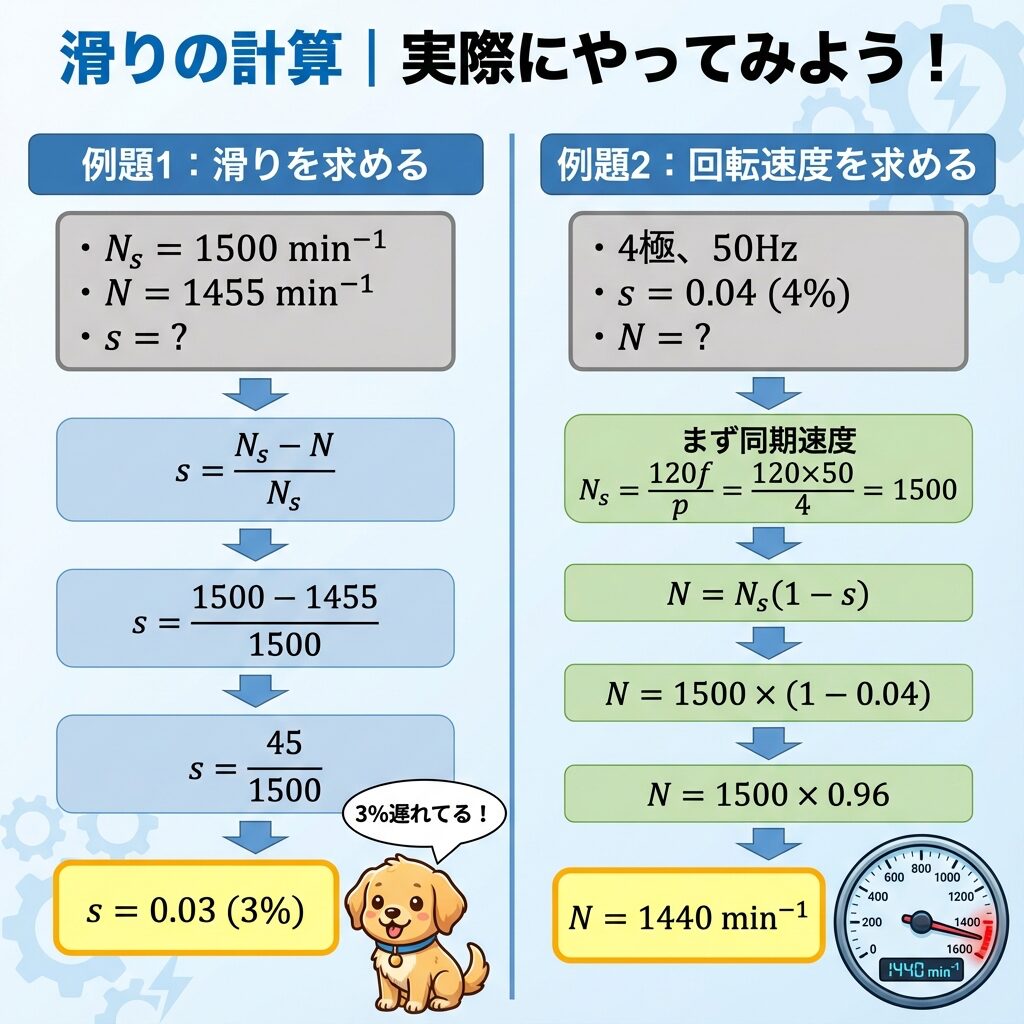
📝 計算例|実際に計算してみよう!
例題1:滑りを求める
📋 問題
同期速度 Ns = 1500 min⁻¹ の誘導電動機が、N = 1455 min⁻¹ で回転している。滑り s を求めよ。
✏️ 解答
公式に代入するだけ!
s = (Ns − N) / Ns
s = (1500 − 1455) / 1500
s = 45 / 1500
s = 0.03(3%)
💡 ポイント:通常運転の滑りは2〜5%なので、3%は正常な運転状態ですね!
例題2:回転速度を求める
📋 問題
4極、50Hzの誘導電動機が、滑り s = 0.04(4%)で運転している。回転子の回転速度 N を求めよ。
✏️ 解答
Step 1:まず同期速度を求める
Ns = 120f / p = 120 × 50 / 4 = 1500 min⁻¹
Step 2:変形公式でNを求める
N = Ns(1 − s)
N = 1500 × (1 − 0.04)
N = 1500 × 0.96
N = 1440 min⁻¹
🔄 滑りの公式変形|これも覚えよう!
滑りの公式は、変形して使うことも多いです。
| s = (Ns − N) / Ns | ← 滑りを求める |
| N = Ns(1 − s) | ← 回転速度を求める |
| Ns − N = s × Ns | ← 速度差を求める |
🧠 覚え方のコツ
N = Ns(1 − s) は特に重要!
「回転速度 = 同期速度 ×(1から滑りを引いたもの)」
例:滑り5%なら、同期速度の95%で回転している!
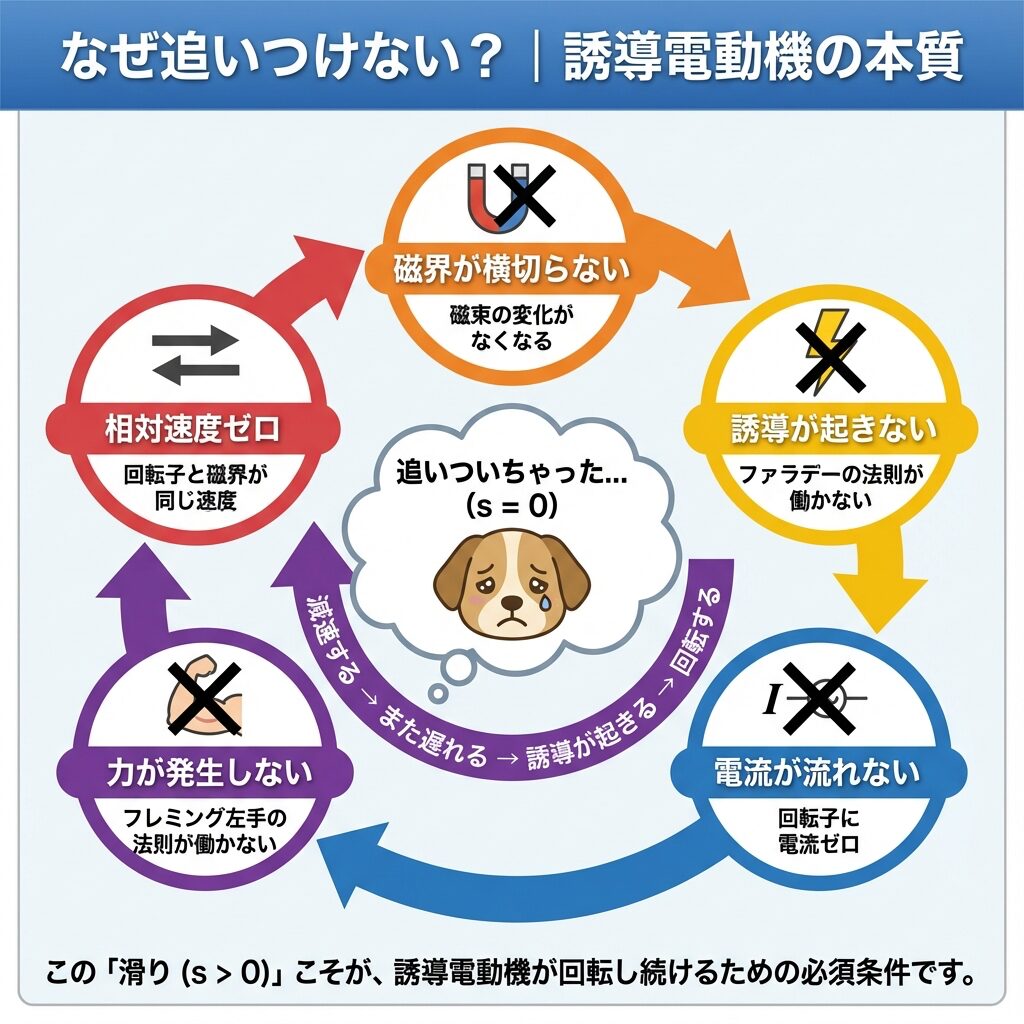
❓ なぜ回転子は追いつけないのか?
ここで、誘導電動機の本質を深堀りしましょう。
追いついたら「誘導」がなくなる!
もし回転子が回転磁界に完全に追いついたら(s = 0になったら)、何が起きるでしょう?
🔴 追いついたら起きること(悪循環)
相対速度がゼロになる
磁界が回転子を「横切らなくなる」
電磁誘導が起きない→ 電流が流れない
電磁力が発生しない→ 力が消える
回転子が減速する → また遅れる → 誘導が起きる → 回転する...
つまり、滑りがないと誘導電動機は動けないのです!
💡 だから「誘導」電動機!
滑りがあるからこそ電磁誘導が起き、電流が流れ、力が生まれる。滑りは誘導電動機の存在意義そのものなんです!
📝 まとめ
🏆 これだけ覚えて帰ろう!
| 滑りとは | 回転磁界にどれだけ遅れているかの割合 |
| 公式 | s = (Ns − N) / Ns |
| s = 0 | 同期速度(実際はありえない) |
| s = 1 | 停止(始動時) |
| 通常運転 | s = 0.02〜0.05(2〜5%) |
📚 誘導機シリーズ 全記事一覧
| 2-1. 三相誘導電動機の原理 🔗 | 2-4. トルクと出力の関係 🔗 |
| 2-2. 滑り(すべり)🔗 | 2-5. 等価回路 🔗 |
| 2-3. 比例推移 🔗 | 2-6. 始動法 🔗 |
| 2-7. 速度制御法 🔗 | 2-8. 単相誘導電動機 🔗 |
機械科目の全体像|学習ロードマップ →
