- 直流機と誘導機の等価回路、どっちがどっちだったか混同する
- 「同期速度」は誘導機にも同期機にも出てくるけど、何が違うの?
- 鉄損と銅損、どの機器でも出てくるけど、効率が最大になる条件は全部同じ?
- 変圧器は「回転しない」のに、なぜ4機の仲間に入っているの?
- 個別には勉強したけど、横断的に比較する問題が出ると全然解けない
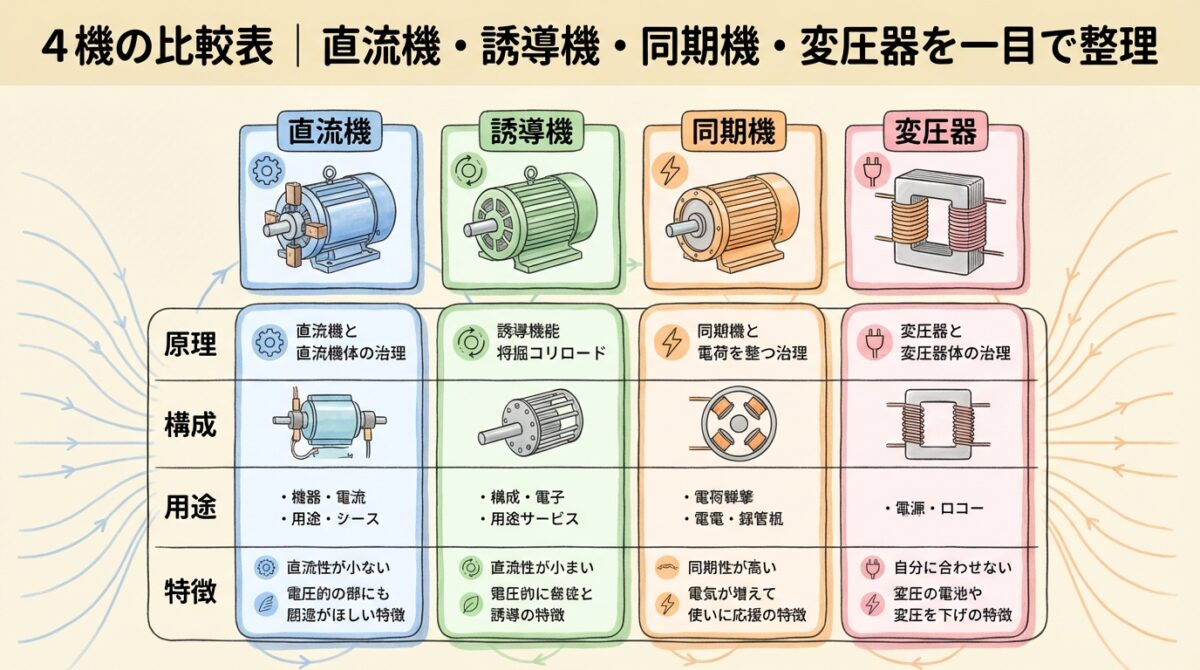
- 直流機・誘導機・同期機・変圧器の共通点と相違点を比較表で一目整理
- 構造・原理・等価回路・損失・速度制御・用途を横断的に比較
- 各機器の詳細解説記事へのリンクを完備(このページがハブ=地図の役割)
電験三種・機械科目の配点の約6〜7割を占めるのが「4機」です。直流機、誘導機(誘導電動機)、同期機(同期発電機・同期電動機)、変圧器——この4つの電気機器を総称して「4機」と呼びます。
個別の記事でそれぞれの機器を深掘りしていますが、R06年(上期)問7のように「4機を横断的に比較する正誤問題」が出題されることがあります。このタイプの問題は、各機器を個別に理解しているだけでは解けません。「共通点」と「相違点」を並べて比較する視点が必要です。
この記事は、4機の学習の「地図」です。まず全体像をつかんでから、気になる機器の詳細記事に飛んでください。
目次
4機の全体像|なぜこの4つがセットなのか
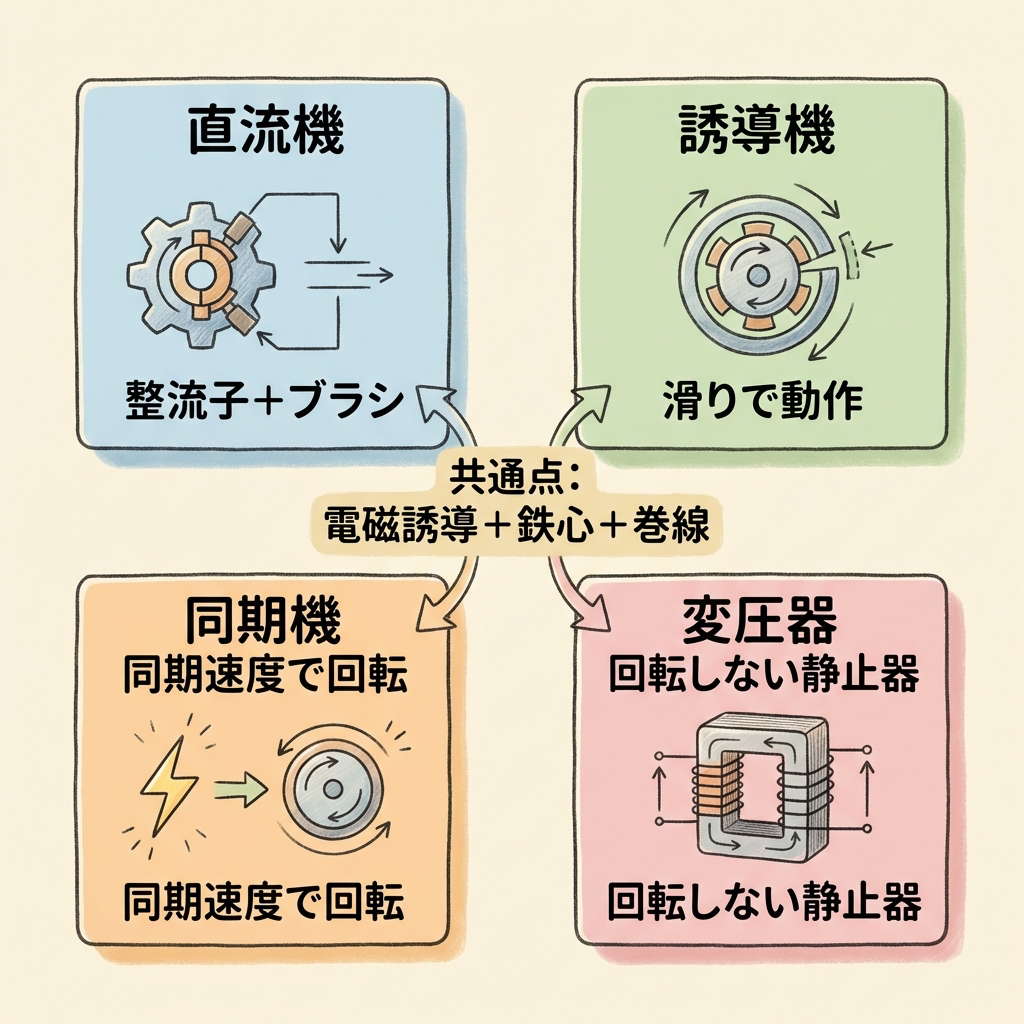
まず「なぜ変圧器が4機に含まれるのか?」という疑問に答えます。変圧器は回転しません。モーターでも発電機でもありません。しかし変圧器は、電磁誘導の原理で動作する電気機器という点で他の3つと共通しています。
実は4機すべてに共通するのは「電流が流れるコイル」と「磁束」が存在すること。この2つの相互作用で、電圧を変換したり、回転力を生み出したり、電気を発電したりしています。
直流機
直流で回転
整流子+ブラシ
電動機 / 発電機
誘導機
交流で回転
滑りで動作
電動機がメイン
同期機
交流で回転
同期速度で回る
発電機がメイン
変圧器
回転しない
電圧を変換
静止器
① すべて電磁誘導の原理を利用している
② すべて鉄心(コア)と巻線(コイル)で構成されている
③ すべて鉄損(ヒステリシス損+渦電流損)と銅損(I²R損)が発生する
④ 効率が最大になる条件:鉄損 = 銅損(全機器共通!)
「4機に共通する特性」として、上記の①〜④が正しいかどうかを問う問題です。特に④の「効率最大条件 = 鉄損=銅損」は、変圧器でも誘導機でも同期機でも直流機でも同じ。「〇〇機では効率最大条件が異なる」→ ×(誤り)のひっかけが定番です。

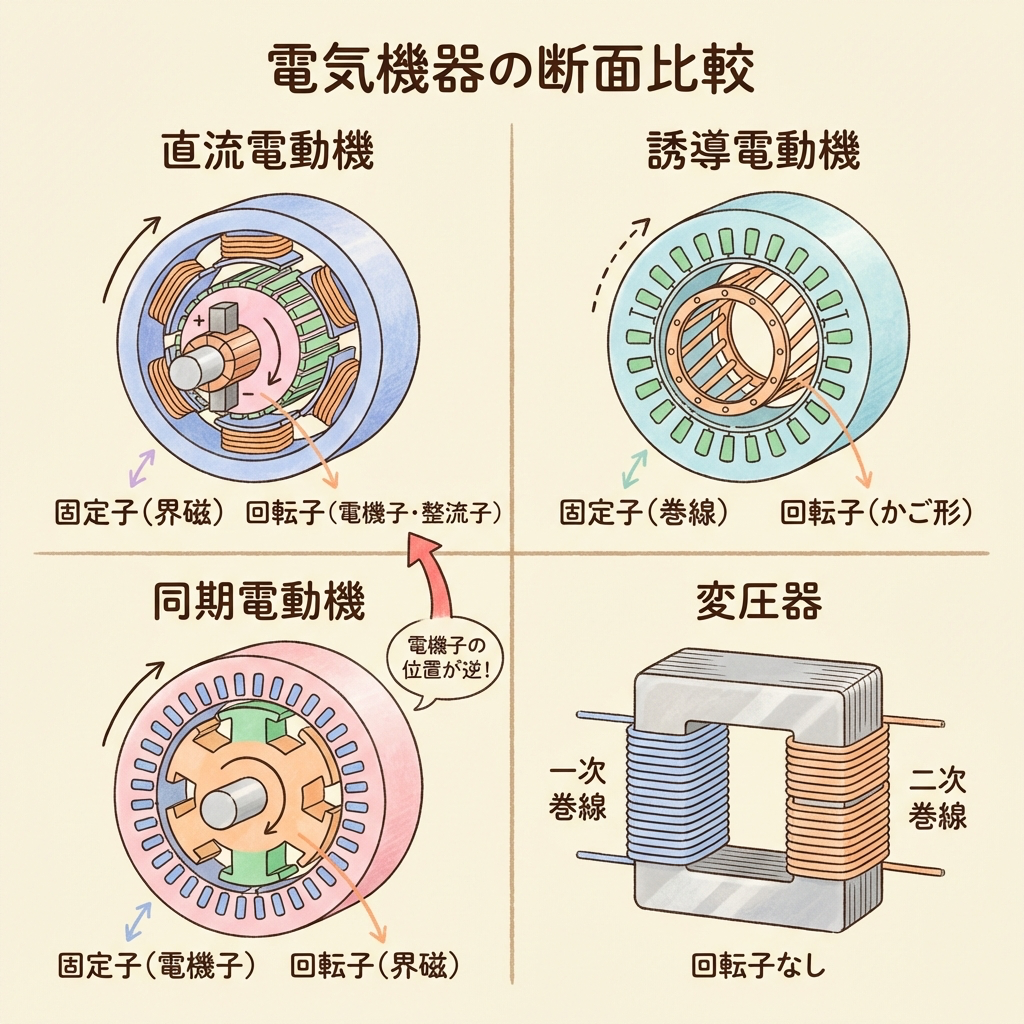
構造の比較|何が回転し、何が固定されているか
4機の最大の違いは「構造」です。何が回転するか、磁束をどうやって作るかが機器ごとに異なります。
| 項目 | 直流機 | 誘導機 | 同期機 | 変圧器 |
|---|---|---|---|---|
| 電源 | 直流 | 交流(三相) | 交流(三相) | 交流 |
| 固定子 (ステータ) |
界磁 (磁束を作る) |
固定子巻線 (回転磁界を作る) |
電機子巻線 (電圧が誘導される) |
1次巻線+2次巻線 (同じ鉄心に巻く) |
| 回転子 (ロータ) |
電機子 (電圧が誘導される) |
かご形 or 巻線形 (誘導電流が流れる) |
界磁 (磁束を作る) |
なし (回転部がない) |
| 特徴的な部品 | 整流子+ブラシ | かご形導体 (またはスリップリング) |
スリップリング (界磁への給電用) |
鉄心(コア) (磁気結合) |
「直流機の電機子は固定子側にある」→ ×(誤り)。直流機の電機子は回転子側です。一方、同期機の電機子は固定子側にあります。直流機と同期機では、「電機子」と「界磁」の位置が逆になっている点が超重要です。
大型の同期発電機では、電機子に大電流が流れます。この大電流をスリップリングで取り出すのは困難。そこで小電流で済む界磁側を回転子にして、大電流が流れる電機子を固定子にしています。これを「回転界磁形」と呼びます。
📘 構造をもっと詳しく知りたい方はこちら
直流機の構造と原理|電機子・界磁・整流子の役割を完全図解 →
三相誘導電動機の原理|回転磁界から同期速度まで完全図解 →
同期機の構造と原理|回転界磁形はなぜ主流なのか? →
変圧器の基本原理|電磁誘導から巻数比まで完全マスター →
動作原理の比較|何が回転力を生んでいるか
4機はすべて「電磁誘導」を利用していますが、回転力(トルク)を生み出す仕組みはそれぞれ異なります。
| 項目 | 直流機 | 誘導機 | 同期機 | 変圧器 |
|---|---|---|---|---|
| 動作原理 | フレミングの左手の法則 (電磁力F=BIL) |
アラゴの円板の原理 (回転磁界と誘導電流) |
磁石の吸引・反発 (同期速度で回転) |
相互誘導 (ファラデーの法則) |
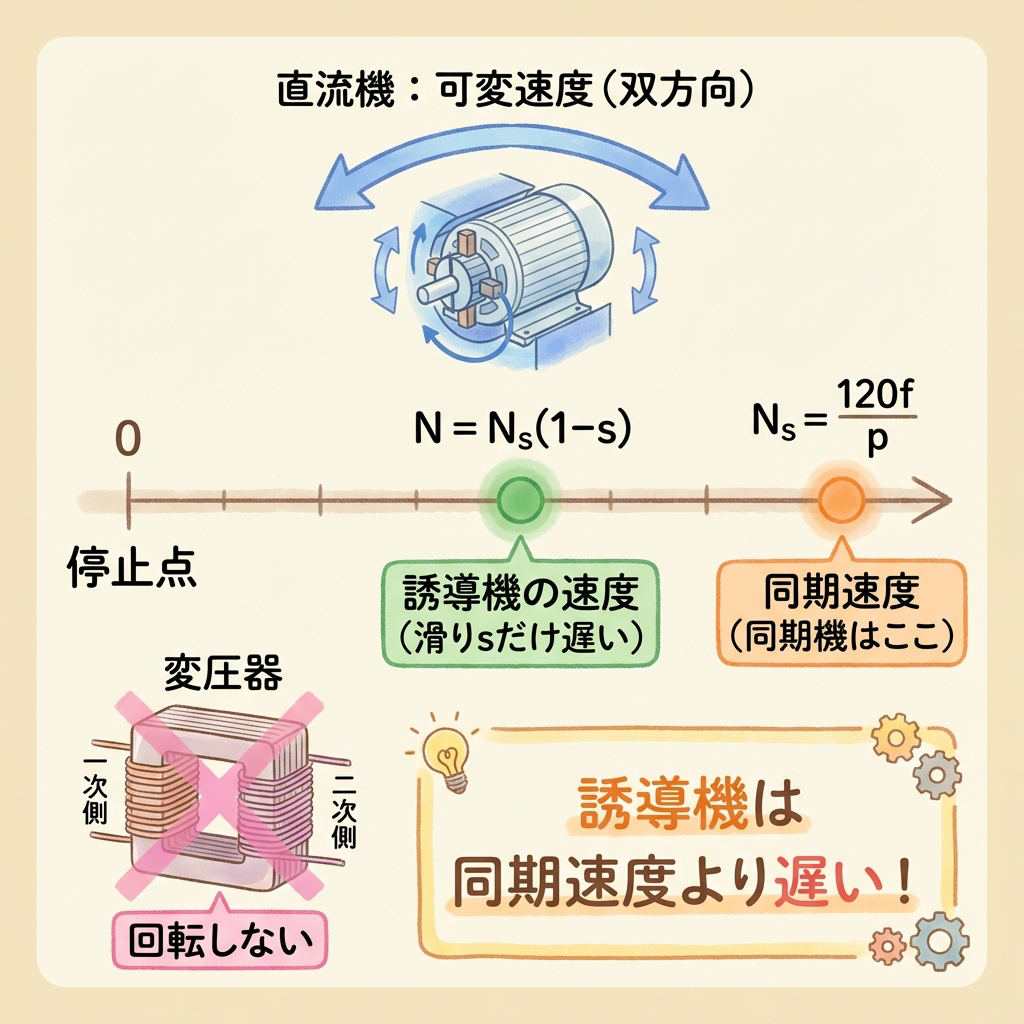
| 回転速度 | 電圧・界磁で調整 (連続可変) |
同期速度より遅い N = Ns(1-s) |
常に同期速度 Ns = 120f/p |
回転しない |
| 滑り(s) | 概念なし | あり(s>0) s=0だとトルク=0 |
s=0 (常に同期) |
概念なし |
| 主な用途 | 電動機:クレーン、EV 発電機:減少傾向 |
産業用モーターの90% ポンプ、ファン、コンベア |
発電所の発電機 力率改善用電動機 |
電圧の昇降圧 送電・配電・家庭用 |
・誘導機:同期速度より遅い(滑りs > 0)。滑りがないと回転磁界との速度差がなくなり、誘導電流が流れず、トルクが出ない。
・同期機:常に同期速度ぴったり(s = 0)。負荷が増えても速度は変わらず、代わりに負荷角δが変化する。
「誘導機は同期速度で回転する」→ ×(誤り)。これは正誤問題の最頻出ひっかけです。
📘 動作原理をもっと詳しく知りたい方はこちら
直流機の誘導起電力とトルク|E=kΦNの公式を導出から計算例まで →
滑り(すべり)s|誘導電動機の超重要キーワードをイメージでマスター →
同期発電機の出力と負荷角δ|P=(VE₀/Xs)sinδの意味を完全図解 →
変圧器の基本式を完全マスター|巻数比aから電圧・電流・インピーダンスを一発計算 →
{kind=link}
等価回路の比較|「なぜ似ているのか」を理解する
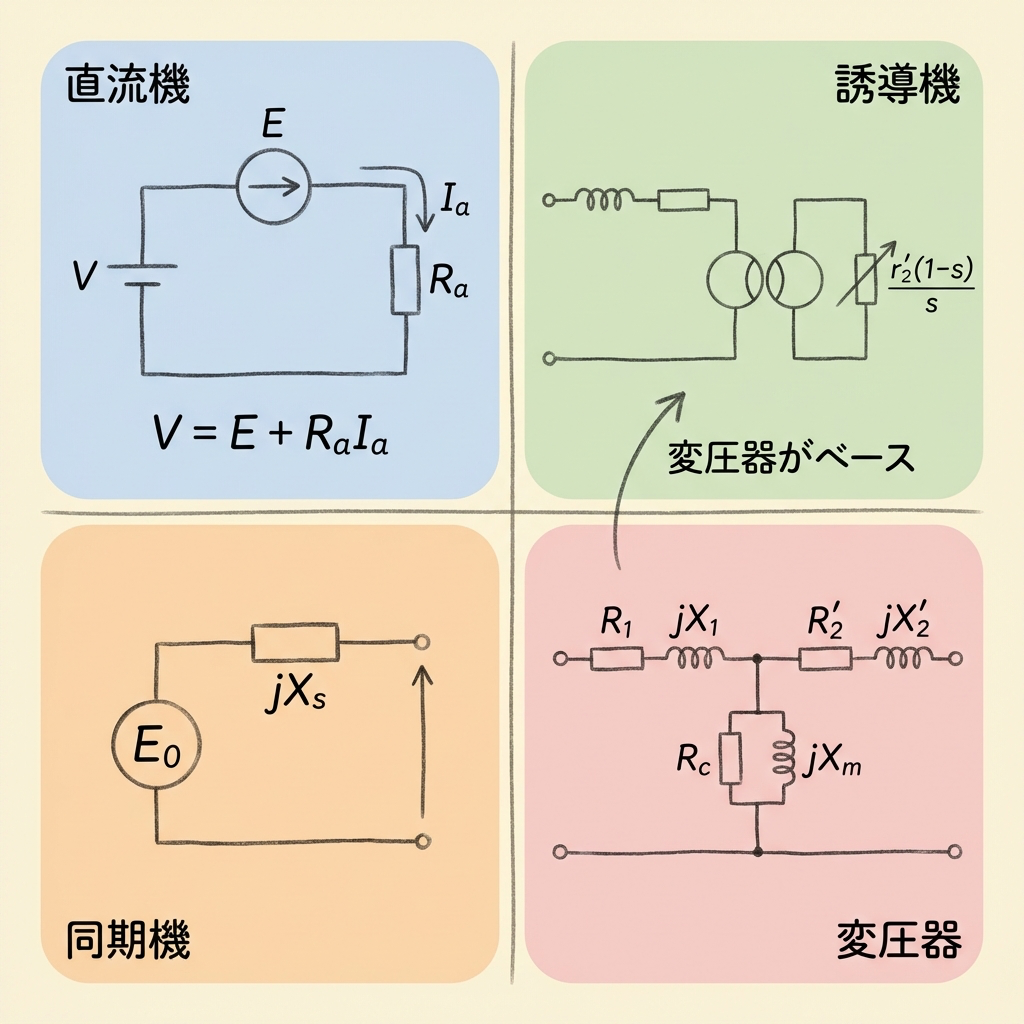
4機の等価回路は一見バラバラに見えますが、実は「変圧器の等価回路がベース」になっています。誘導機の等価回路は変圧器の二次側に「負荷抵抗」を加えたもの。同期機は逆起電力と同期インピーダンスで表現。直流機は最もシンプルで抵抗と逆起電力だけです。
| 項目 | 直流機 | 誘導機 | 同期機 | 変圧器 |
|---|---|---|---|---|
| 等価回路の 構成要素 |
V = E + RaIa (逆起電力E+電機子抵抗) |
変圧器+可変抵抗 r₂'(1-s)/s |
V = E₀ + jXsI (同期インピーダンス) |
1次巻線抵抗+漏れリアクタンス +励磁回路 |
| 変圧器との 関係 |
直接の関係なし (直流回路) |
変圧器の2次側に 負荷抵抗を追加 |
逆起電力E₀ + 同期リアクタンスXs |
基本形 (すべての原型) |
| 等価回路で 求めるもの |
電機子電流Ia トルクT |
二次電流I₂' トルクT、出力P |
電機子電流Ia 出力P、負荷角δ |
二次電圧V₂ 電圧変動率ε |
誘導機の固定子(ステータ)は変圧器の1次側、回転子(ロータ)は2次側に相当します。違いは、2次側が回転すること。回転を「滑りs」で表現した抵抗 r₂'(1-s)/s が等価回路に加わります。変圧器の等価回路が理解できていれば、誘導機の等価回路は自然に理解できます。
📘 等価回路をもっと詳しく知りたい方はこちら
直流機の計算パターン完全網羅|頻出5パターンを途中式ありで完全解説 →
三相誘導電動機の等価回路|複雑な回路をイメージで攻略 →
同期発電機の等価回路とベクトル図|無負荷誘導起電力E₀の求め方 →
変圧器の等価回路を完全攻略|一次換算・簡易等価回路・%Zを図解でマスター →
損失と効率の比較|4機に共通する「鉄損と銅損」
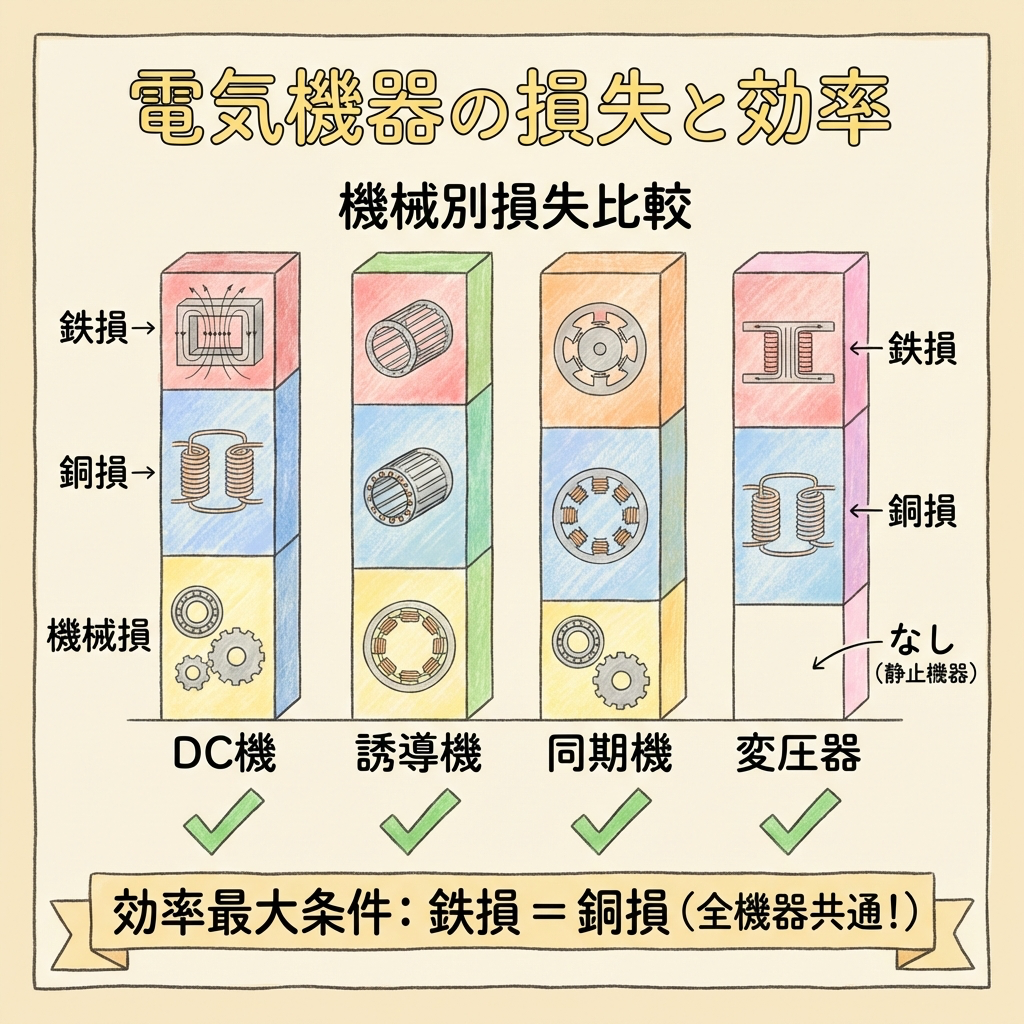
4機すべてに鉄損(鉄心で発生するヒステリシス損+渦電流損)と銅損(巻線の抵抗で発生するI²R損)が存在します。そして効率が最大になる条件も共通しています。
| 項目 | 直流機 | 誘導機 | 同期機 | 変圧器 |
|---|---|---|---|---|
| 鉄損 (固定損) |
電機子鉄心で発生 (負荷に無関係) |
固定子鉄心で発生 (負荷に無関係) |
固定子鉄心で発生 (負荷に無関係) |
鉄心で発生 (負荷に無関係) |
| 銅損 (可変損) |
電機子巻線 I²Ra (負荷に比例して増加) |
1次+2次巻線 I²r (負荷に比例して増加) |
電機子巻線 I²Ra (負荷に比例して増加) |
1次+2次巻線 I²r (負荷に比例して増加) |
| 機械損 | あり (軸受摩擦、風損) |
あり (軸受摩擦、風損) |
あり (軸受摩擦、風損) |
なし (回転部がない) |
| 効率最大条件 | 鉄損 = 銅損(固定損 = 可変損)のとき、効率が最大になる ← 4機すべて共通! | |||
📘 損失と効率をもっと詳しく知りたい方はこちら
変圧器の損失と効率|鉄損・銅損・最大効率条件を完全マスター →
トルクと出力の関係|P₂:P:Pc = 1:(1-s):s を完全マスター →
速度制御と始動法の比較|「どうやって回すか」「どうやって止めるか」
| 項目 | 直流機 | 誘導機 | 同期機 | 変圧器 |
|---|---|---|---|---|
| 速度制御法 | ①電圧制御 ②界磁制御 ③抵抗制御 |
①周波数制御(VVVF) ②極数切替 ③二次抵抗制御 ④電圧制御 |
速度制御しにくい (常に同期速度) 周波数を変えるしかない |
該当なし (タップ切替で電圧調整) |
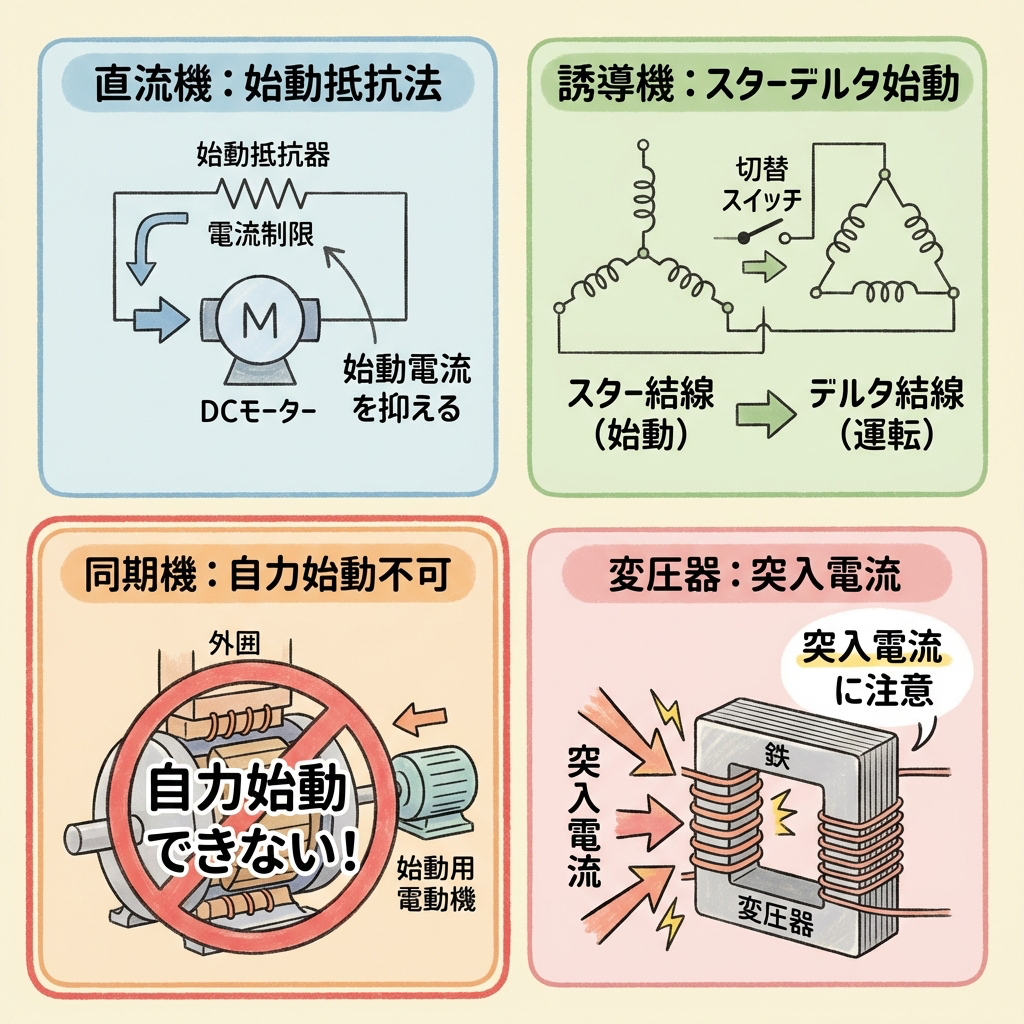
| 始動法 | 始動抵抗器で 電機子電流を制限 |
①直入れ始動 ②Y-Δ始動 ③始動補償器 ④インバータ始動 |
自力始動できない →始動用誘導電動機 →インバータで始動 |
該当なし (突入電流に注意) |
| 特筆事項 | 分巻:定速度特性 直巻:変動速度特性 無負荷で暴走注意 |
Y-Δ始動で 始動電流が1/3 始動トルクも1/3 |
乱調(ハンチング) 脱調に注意 V曲線(力率調整) |
励磁突入電流 (定格の数十倍) 並行運転の条件 |
同期電動機は、停止状態から交流電源を投入しても自力では回り出しません。回転磁界の回転速度(同期速度)にいきなり追従できないからです。始動には補助的な手段(始動用巻線・インバータなど)が必要です。「同期電動機は直入れ始動で始動できる」→ ×(誤り)。
📘 速度制御・始動法をもっと詳しく知りたい方はこちら
直流電動機の速度制御と始動法|電圧制御・界磁制御・抵抗制御を比較 →
誘導電動機の始動法|直入れ・Y-Δ・始動補償器をイメージでマスター →
三相誘導電動機の速度制御|4つの方法をイメージでマスター →
同期電動機の特徴とV曲線|力率改善と同期調相機を完全図解 →
変圧器の並行運転の条件|4つのルールを図解でマスター →

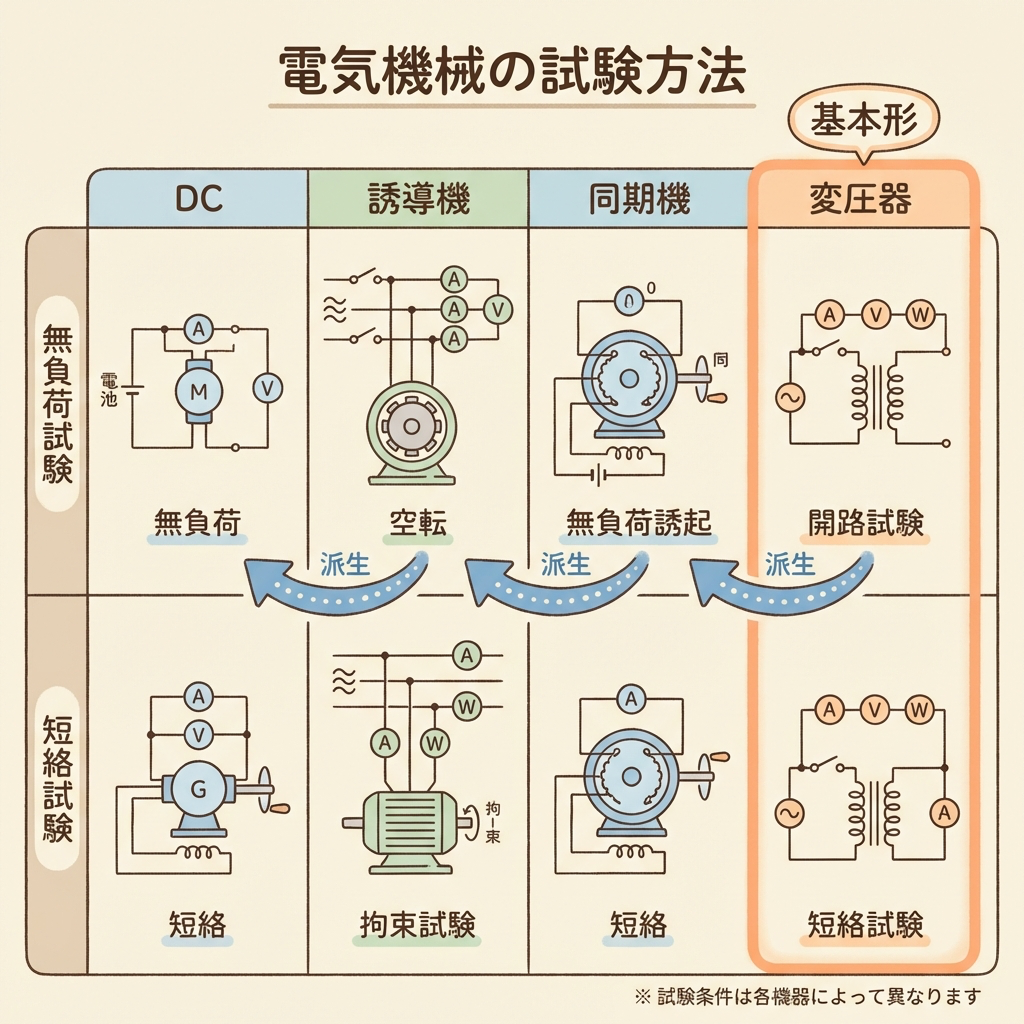
試験と種類の比較|無負荷試験・短絡試験・特性試験
4機にはそれぞれ「特性を知るための試験」が存在します。これらの試験名と目的を混同させる正誤問題が出ます。
| 試験 | 直流機 | 誘導機 | 同期機 | 変圧器 |
|---|---|---|---|---|
| 無負荷試験 | 無負荷特性 (E vs If) |
無負荷試験 (鉄損+機械損を測定) |
無負荷飽和曲線 (E₀ vs If) |
無負荷試験 (鉄損+励磁電流を測定) |
| 短絡試験 | — | 拘束試験 (回転子を固定=s=1) |
三相短絡試験 (短絡比Ksを求める) |
短絡試験 (銅損+%Zを測定) |
| 試験の目的 | 界磁電流と 起電力の関係を把握 |
等価回路の 定数を決定 |
同期インピーダンスXs と短絡比Ksを決定 |
鉄損・銅損・%Z を分離して測定 |
📘 試験の詳細をもっと知りたい方はこちら
同期発電機の特性|短絡比・%同期インピーダンス・無負荷飽和曲線 →
変圧器の試験|無負荷試験・短絡試験で何がわかる?完全図解 →
各機器の完全攻略マップ|ここから全記事にアクセスできます
各機器には、1記事で全体像を掴める「完全攻略マップ(ロードマップ)」記事があります。まだ個別の機器を深掘りしていない方は、ここから始めてください。

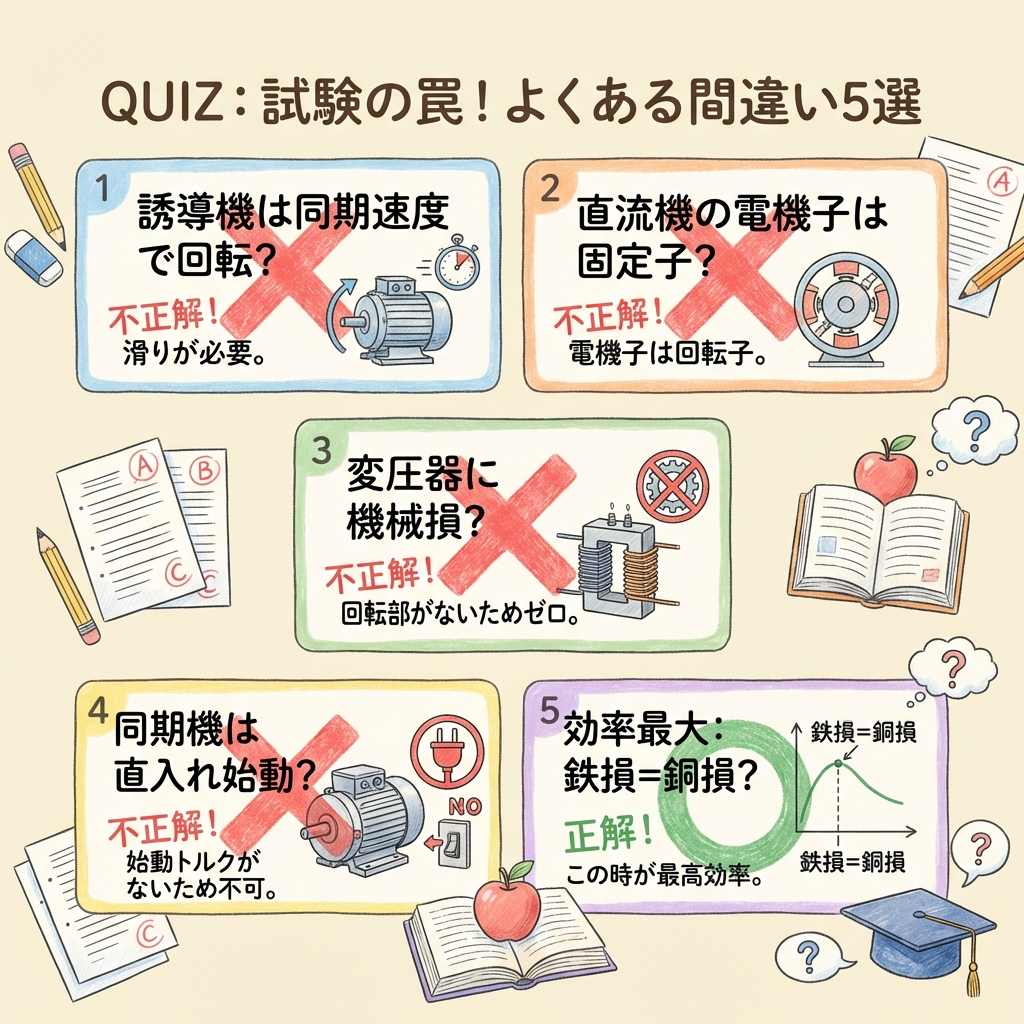
正誤問題で狙われる「4機横断のひっかけポイント」総整理
| No. | ひっかけ選択肢の例 | 正誤 | 正しい知識 |
|---|---|---|---|
| 1 | 誘導電動機は同期速度で回転する | × | 同期速度より遅い(滑りs > 0) |
| 2 | 直流機の電機子は固定子側にある | × | 直流機の電機子は回転子側。同期機と逆 |
| 3 | 変圧器には機械損が発生する | × | 変圧器に回転部はない。機械損なし |
| 4 | 同期電動機は直入れ始動で始動できる | × | 同期機は自力始動できない。補助手段が必要 |
| 5 | 効率が最大になる条件は機器ごとに異なる | × | 鉄損=銅損のとき効率最大。全機器共通 |
| 6 | 直巻直流電動機は無負荷で運転すると危険である | ○ | 正しい。無負荷で界磁電流が減り暴走する |
| 7 | 同期発電機の並行運転には、電圧・周波数・位相・相順を一致させる必要がある | ○ | 正しい。並行運転の5条件(+波形一致) |
直流電動機の種類と特性|分巻・直巻・複巻の速度-トルク曲線を一目で比較 →
同期発電機の並行運転|5つの条件と横流・同期化力を完全図解 →
まとめ
📝 この記事のポイント
✅ 4機すべてに共通:電磁誘導の原理、鉄心+巻線の構造、鉄損+銅損の発生
✅ 効率最大条件は鉄損=銅損(4機すべて共通)
✅ 直流機の電機子は回転子、同期機の電機子は固定子(位置が逆)
✅ 誘導機は同期速度より遅く回転(滑りs > 0)、同期機は常に同期速度
✅ 同期電動機は自力始動できない。直巻直流電動機は無負荷で暴走
✅ 誘導機の等価回路は変圧器の発展形
✅ 変圧器は回転しないが、電磁誘導の原理で動作する静止器として4機に含まれる
4機の横断比較問題は、個別の知識だけでは解けません。「共通する原理は何か」「各機器の固有の特徴は何か」を表で整理して、違いを明確にしておくことが重要です。各機器の詳細が気になったら、この記事に貼られたリンクから個別の解説記事に飛んでください。この記事が、あなたの4機学習の「地図」になれば幸いです。
📚 次に読むべき記事
4機だけでなく、パワエレ・自動制御・情報・電動機応用など全10分野の勉強順序がわかるロードマップです。
4機の等価回路の「原型」である変圧器を先に理解すると、他の3機の理解が格段に速くなります。
合格者が「もっと早く買えばよかった」と後悔したアイテムをランキング形式で紹介。